
個人用知的移動体による屋内自動トランスポーテーションに関する研究
概要
個人用知的移動体AT(Attentive Townvehicle)は、搭乗者である人間やAT自身を取り巻く環境に適応して移動する個人用の 乗り物である。自身が情報端末であること、センサ類が装備されていることから、ATは自ら周囲の情報を取得・処理し、その結果を 移動に反映することが可能である。さらに現在開発中のATは、駆動系にオムニホイールを用いて全方位移動とその場回転を実現し、 人間の直感に合った移動を可能にしている。我々はATを用いることで、「人間の移動」と「情報」を密接に結び付けることを目標 としている。
近年、カーナビゲーションや携帯電話によるナビゲーションなど様々なナビゲーションシステムが開発・実用化されている。 しかし、これらのシステムでは人間を目的地まで誘導することはできても、人間を目的地まで物理的に移動させることはできない。 たとえ、小型の情報端末から取得した情報により目的地の場所や目的地までの経路が把握できても、実際に安全に目的地まで移動 するのは我々人間なのである。また、小型情報端末を操作・閲覧して情報を取得しながら移動することは、情報端末に気を取 られて身近に迫る危険や重要な情報を見落とす可能性があるため、非常に危険であると考えられる。この問題を解決するため 本研究では、建物内において移動体が自動走行により搭乗者を目的地まで安全に連れて行くという、屋内自動トランスポーテーション の仕組みを提案し、実環境においてATを利用したシステムを構築した。
本システムは屋内専用であるため、PSD~(Position Sensitive Detector)センサで常に壁を検出して壁との距離を一定に 維持しながら走行するようになっている。壁に沿って進むことで地図との対応を取りやすくし、さらに位置を知るためのランドマークとして、 軽量で電源を必要としないRFID~(Radio Frequency Identification)タグを壁に設置した。曲がり角での右折・左折は、 ATの全方位移動とその場回転の機能を活かして実現した。
屋内自動トランスポーテーションは、ATのタッチパネル式コンソール画面で目的地を設定した後、曲がり角での右折・左折も含めて 壁沿いを自動走行し、目的地に到着すると停止するという流れである。また本システムには、移動中に 自動で人や障害物を避ける機能や、到着時に目的地の情報を搭乗者に提示する機能もある。 このように本システムは、人間の移動に関する「物理的な支援」と「情報的な支援」を同時に実現することが可能である。
1 はじめに
近年の情報通信ネットワーク環境・サービスの発達により、現在、我々は「いつでも、どこでも、何でも、誰でも」情報ネットワーク に接続することができるユビキタスネットワーク社会の到来を迎えている。これまでの情報通信社会では、パソコンや携帯電話など の情報通信ネットワークを利用するための専用の情報端末が普及してきた。しかし最近では、そのような専用の情報端末以外にテレ ビゲーム機や携帯ゲーム機、さらには携帯音楽プレーヤーがインターネット接続機能を標準装備するようになるなど、情報端末とし ての一面をもつ機器が増えてきている。このようにユビキタスネットワーク社会ではこれまで情報端末ではなかったものが情報端 末化するため、日常生活の中で我々と情報端末との結びつきがより密接になる。その結果、近い将来、我々は情報端末であることを 意識することなくそれらを利用するようになると考えられる。
現在、我々の生活する実世界と情報の世界をつなぐ考え方として、移動中あるいは外出先などいつでも・どこでもコンピュータを 利用するというモバイルコンピューティングが主流となっている。このことは今日のノートパソコンや携帯情報端末の高性能化・ 高機能化や、携帯電話やPHSによるデータ通信の高速化からも明らかである。また、モバイルコンピューティングの進化形として、 小型化・軽量化した情報端末を常に身に付けて使うウェアラブルコンピューティングという考え方も広がり、その考えを基にした 研究も数多く行われている 。
しかし、モバイルコンピューティングやウェアラブルコンピューティングというコンセプトのもと、情報端末の高性能化・小型化が進んでも 人間の生活する実世界と情報の世界を密接に結びつけることには限界があると考えられる。なぜなら、情報端末を持ち歩くだけでは、 人間の物理的な行動に連動させて情報処理を行い、その結果を直接的に人間の行動に対して反映させることができないからである。 例えば、携帯電話を用いて現在位置周辺のレストランを見つけることができても、実際にそのレストランまで行くのはユーザ自身であり、 携帯電話にはユーザをそのレストランまで連れて行くことも、ユーザが本当にそのレストランにたどり着いたかどうかを知ることもできない。 また、超小型の端末を身に付けていれば、街中を歩行中に近くを走る自動車など周辺の情報とやりとりし、歩行者とドライバーの双方に 危険を回避するよう通知することはできる。しかし、実際に危険を回避するように行動するのは人間であって、小型の端末が人間を動かす のではない。それゆえ、人間が情報端末を持ち運ぶという発想をさらに発展させた考え方で、我々の日常生活一般を支援するシステムを 開発することが望まれる。
そこで、筆者の所属する研究室では、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、移動体を用い て人間を物理的に移動させるという発想で、我々の生活する実世界と情報の世界をより密接に関連付ける方法を探っている。人間に とって「移動」は、自立的かつ快適に生活するために必要不可欠な行動であり、我々は生活の大部分において「移動」しなければな らない。そのために人間はこれまで、自動車・バイク・車椅子など様々な移動体を数多く作り上げ、現在も幅広くそれらを利用して いる。このことから、人間の「移動」と情報端末との新たな関係を見出すために、日常的な移動体そのものを情報端末とする手法が 考えられる。つまり、乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動とを連動させる、搭乗型(マウンタブル) コンピューティングという考え方である。この搭乗型コンピューティングのコンセプトのもと、情報端末化した移動体の一つと して、我々はAT(Attentive Townvehicle)と呼ばれる個人用の知的移動体を設計・開発している。
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、個体間通信によって協調的に動作することを目的とした移動体であ る。ATはそれ自体が情報端末であるがゆえに、搭乗者である人間は常に情報の世界にアクセスでき、また情報の世界からのフィード バックをすぐに反映することができる。また、ATに搭乗者の嗜好や特性を蓄積していくことで、搭乗者に適したスピードで走行した り、搭乗者が興味をもちそうな情報を提示したりするなど、搭乗する人間一人一人が利用しやすいようにATをカスタマイズすること もできる。つまり、ATは物理的文脈を考慮しつつ個別の人間に適応した情報処理を行うことで、その人の活動にとって最適な情報環境 を形成することができる。
またATは、自動車やバイクなどと異なり、屋内と屋外の両方で利用されることを想定した、一人乗り用の小型の移動体である。 そのため、ATを利用して移動する際の移動の粒度は自動車やバイクなどに比べてかなり細かくなければならない。ATの動きは、 いつでも好きな方向に転換でき、どの方向にもすぐに動き出せるという、人間の動きにより近いことが望まれる。そこで、現在 我々が開発中のATは、駆動系にオムニホイールと呼ばれる複合車輪を用いて全方位移動とその場回転を実現している。自動車やバイク、 自転車では不可能であった左右への横スライド走行、移動体の中心を回転中心とするその場回転が可能になったことで、我々が「動きたい」と 思う通りの動き、すなわち人間の直感に合った動きができるようになった。我々の考える搭乗型コンピューティングにおいては、 このようなユーザの直感に合った移動だけでなく、ユーザの直感に合った操作・操縦も目指している。それゆえ、操縦には我々にとって 比較的馴染み深く直観的操縦が可能なゲーム機のリモコンを、各種設定や情報へアクセスを行う際のATの操作にはタッチパネルを 用いるなど、ATのユーザインタフェースを可能な限り簡単なものにしている。ATのシステム構成・操作方法については第2章で詳しく述べる。
これまでのATを用いた研究として、走行履歴を体験コンテンツとして蓄積し、その情報を共有・再利用するシステム や、赤外線タグを用いて実世界対象を認識し、その関連情報を提示するシステム などが構築されてきた。 しかしこれらのシステムを利用する際、搭乗者はATの運転と取得情報の認識、あるいはその情報に対する操作を両方行わなければならない。 地図上でのATの位置やAT周辺に何があるのかという情報、他のAT搭乗者からのメッセージなどATが取得した情報は、音声のみにとどまらず、 テキスト、画像、さらには動画で搭乗者に伝えられる。そのため、搭乗者が運転と情報認識を同時に行うことは、運転の最中それらの情報に 気を取られて、身近に迫る障害物や人に気付かず、衝突する可能性があり非常に危険である。 だからといって、運転するときは表示される情報を見ないで運転に集中し、情報を見たり、情報にアクセスしたりするときは運転を休止する というのは効率が悪い。このことは、携帯電話で通話しながら車を運転すると、運転者の注意力が散漫になり事故を引き起こしやすいことや、 途中で道がわからなくなっても、走行中はカーナビを操作することができないため停止するまで行き方の情報が得られない、といった 現在の移動体と情報端末との関係に生じる問題と同様である。 この問題を解決するには、移動体が人間を乗せて自動走行し、その搭乗者の目的地まで安全に連れて行くという、自動トランスポーテーションシステム が適切であると考えられる。移動体が人間を自動で安全に目的地まで連れて行くことができれば、人間は移動中も地図を見たり他者と通信して 会話したりなど、運転以外のことに集中することが可能になる。
移動体型情報端末ATの自動トランスポーテーションシステムは屋外と屋内の両方で実現することが望まれる。 しかし、屋外自動トランスポーテーションと屋内自動トランスポーテーションでは、その実現法が大きく異なるため、 単一のシステムとして扱うことは難しいであろう。例えば、屋外ではGPS~(Global~Positioning~System)が利用可能であるのに対して、 屋内では利用不可能であるという、測位方法の違いがある。また、移動の粒度が異なることに付随して、移動体の制限速度や測位精度の許容誤差の範囲 などが屋外と屋内では異なる。それゆえ、自動トランスポーテーションシステムは屋外用と屋内用に分けて扱うべきであると考える。 具体的には、屋外自動トランスポーテーションによって目的の建物まで到達した後、建物の入口でシームレスに屋内自動トランスポーテーションに切替り、 目的の場所まで行くという仕組みを理想としている。
本研究では、この屋外用と屋内用の2種類あるシステムのうちの屋内用、すなわち屋内自動トランスポーテーションを提案する。
近年、高層ビルやショッピングモール、総合病院など大規模な屋内施設が急増している。それに伴い、行くべき場所がわかっていてもその位置や その場所までの行き方がわからない場合や、現在位置から遠く離れていて移動が大変な場合が増えてきている。これらのような場合における、 現在の対処法とその問題点を以下に挙げる。
まず、屋内において目的地の位置や目的地までの行き方が不明な場合には、フロアマップが有効である。フロアマップを見れば、目的地の位置や 目的地と現在位置を結ぶ経路を把握することができる。しかし、フロアマップは建物内の固定した場所、数ヶ所にしか設置されておらず、 我々はまずそのフロアマップを探し当てることから始めなければならない。他にも、近年開発が進んでいる携帯情報端末による 屋内ナビゲーションシステム があるが、これまでに述べてきたように、携帯情報端末を操作して 情報を取得しながら移動することは危険である。また、フロアマップと携帯情報端末のどちらを用いて地図情報を取得しても、地図と実際の状況を 照合して最適経路で移動するには、空間把握能力を駆使しなければならない。
次に、建物内において目的地までの移動が大変な場合には、現在既に実用化されている自動トランスポーテーションシステムの一種である、動く歩道やエスカレータ、 エレベータの利用が有効である。しかし、これらのシステムは、移動の開始地点と終了地点が万人に共通であるため、 多くの人々が同じ移動をすると考えられる場所にしか設置されておらず、個人に適用してそれぞれの目的地まで自動で移動させることはできない。 その他、屋内で人間を自動で移動させるものにインテリジェント車椅子があるが、これは一般の人々が利用するものではない。
現在の対処法が抱えるこのような問題点を全て解決し、建物内において、我々の代わりに目的地の場所や目的地までの経路把握を行い、 同時に我々をその場所まで移動させるシステムが、移動体型情報端末ATによる屋内自動トランスポーテーションである。ATはそれ自身が 情報端末であること、センサ類が装備された移動体であることから、自ら周囲の情報を取得・処理し、その結果を移動に反映させることができる。 それゆえ、目的地の設定さえ人間が行えば、ATが自動でその場所までの経路を把握し、時々刻々と変化する周りの状況に応じて、 危険を回避しながら目的地まで移動することができる。 つまりこのシステムを用いれば、ATの搭乗者は目的地を設定する以外特に何も意識しなくても、目的の場所に辿り着けるのである。 また本システムは、搭乗型コンピューティングというコンセプトのもと開発された移動体型情報端末ATを用いて、情報の世界と我々の生活する 実世界との、より密接な関連付けを行うという、我々の研究が目指す構想を実現するための基本的な手法となるだろう。
本論文では、ATを用いた屋内自動トランスポーテーションの仕組みと実現手法について述べる。本提案手法の要となるのが、 目的地までの安全な自動走行である。そこで、全方位移動が可能なATを用いて、床や天井に移動を補助するレール等を設置することなく、 屋内自動走行を実現する仕組みを提案する。
測位には、軽量で電源を必要としないRFID~(Radio Frequency Identification)タグを用いた。 タグを各部屋の入口や階段・エレベータ等の付近の壁に設置し、ATの前方と左右に装備したタグリーダでそれらのタグを読み取ることで 現在位置およびその周辺の情報を取得するという手法で測位を行った。 障害物回避には、1mの範囲で障害物までの距離を検出可能なPSD~(Position Sensitive Detector)センサを用いた。 PSDセンサで壁との距離を常に一定に保ちながら走行するという、壁沿い走行を行う。この方法は、正確な測位ができない場合でも 地図との対応が取りやすくなるため、比較的安全であると考えられる。 またPSDセンサをATの前後左右に装備したため、ATから見た走行の手がかりとなる壁の方向やATの進行方向を柔軟に変更することができる。 この壁沿い走行の切り替えを、地図情報とRFIDタグによる測位情報に基づいて行うことで、目的地までの自動走行を実現する。
次章以降の本論文の構成は次のようになっている。第2章では個人用知的移動体のコンセプトや構成ついて述べる。 第3章では、屋内自動トランスポーテーションについて、その必要性や実践例および自動走行のアルゴリズムや使用したデバイスなどについて 詳細に述べる。第4章では、提案手法の有効性を検証するための実験とその結果に関する考察について述べる。 第5章では、関連研究について紹介し、最後の第6章で、まとめと今後の課題を述べる。
2 個人用知的移動体AT
AT(Attentive Townvehicle)は、搭乗者である人間や移動体自身を取り巻く環境に適応し、周囲の環境や他の 移動体との通信によって協調的に動作することが可能な個人用の乗り物である。 本章では、ATのコンセプトおよび構成、機能について述べる。
2.1 ATのコンセプト
搭乗型コンピューティングはモバイルコンピューティングやウェアラブルコンピューティングというコンセプトを拡張して、 いつでもどこでも情報処理を支援するだけでなく、移動や運搬などの物理的行動も同時に支援しようというコンセプトである。 我々は新しい個人用の乗り物としてAT(Attentive Townvehicle)を開発し、それを取り巻く物理的・情報的環境に関する研究・開発を 行っている。ATは人間中心の状況認識機能をもつ知的な移動体である。人間はATに乗り込むことで、情報システムと一体化し、 情報環境と物理環境をリンクする。また、複数のATは協調的に動作することができ、安全に走行できるだけでなく、人間の コミュニティ活動や社会ネットワーク構築も支援することができる。
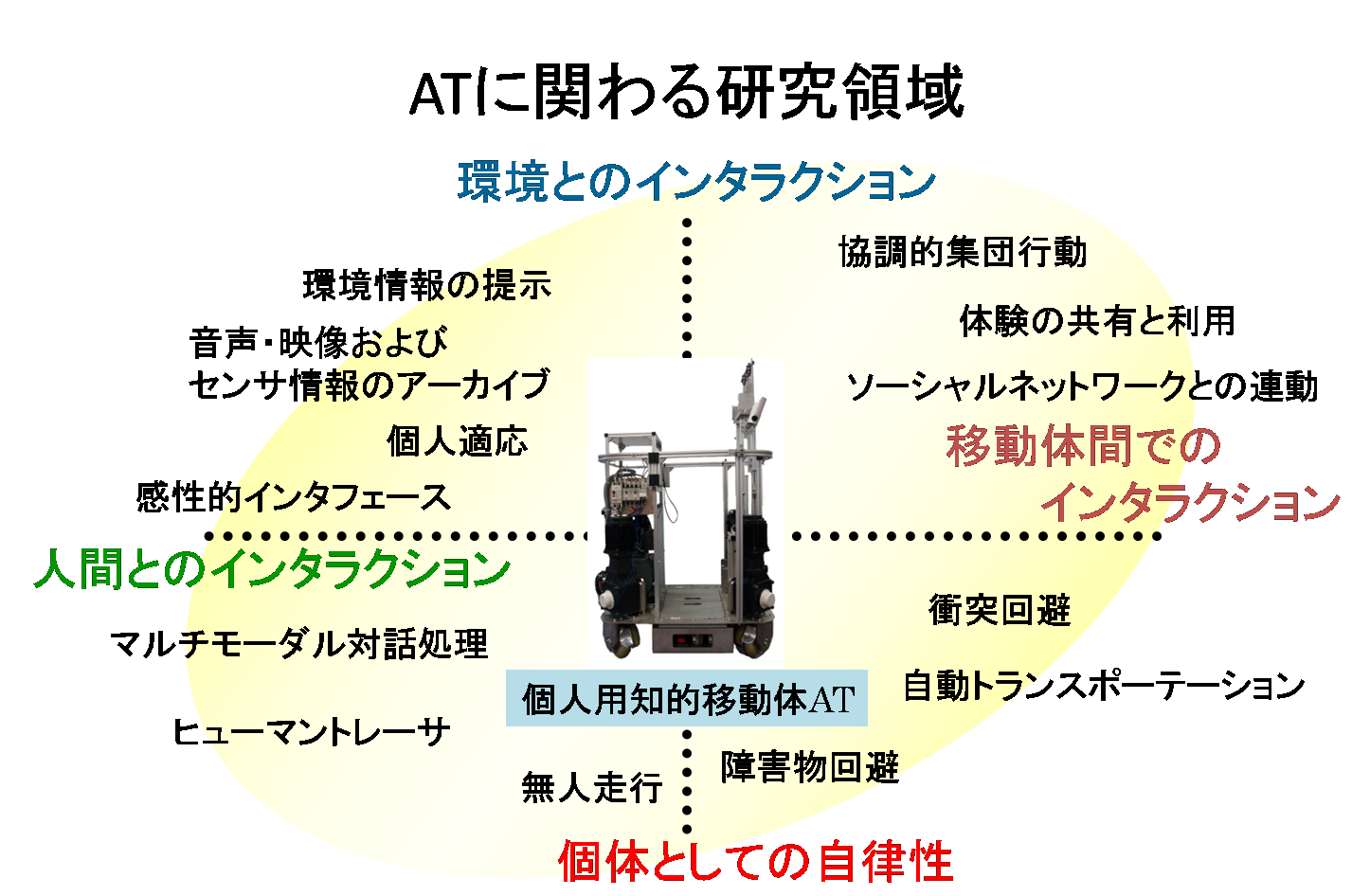
図2.1: ATに関わる研究領域
図 に示すように、ATを用いた研究領域は多岐に渡っている。これは、人間と情報端末としての 移動体の双方に関わる問題が広い領域にまたがっていることに 起因していると考えられる。我々はATをより知的な移動体にするため、ATと「環境」「人間」「他のAT」という各要素間にある3つ のインタラクションに「ATの個体としての自律性」を加えた4つの軸をもとに研究を進めている。図 に示した、その4つの軸をこれまでに行われた研究と共に解説する。
-
ATと環境とのインタラクション
ここでの環境とは、物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ。物理的環境とは、 人間は感覚や運動により、ATはセンサ類やモータにより認識あるいは作用することができる現実世界の対象や状態を指す。 一方、情報的環境とはATがアクセスできるコンテンツや情報サービスの集合を指す。これに関して行われた研究に、実世界対象物の認識手法 や 場所に連動した情報コンテンツの利用 などがある。
-
移動体がユーザの特性を把握し、移動体を利用すればするほどユーザに適応していく個人適応という研究課題がある。また、状況 に応じた操作インタフェースを提供することも考えられる。具体的には、より直観的な操縦インタフェースを追求したり、非搭乗 時の遠隔操作を可能にしたりするのである。これまでには、非搭乗時に自動的に人間を追尾させる研究も行われている 。
ATと人間とのインタラクション
-
AT間(移動体間)のインタラクション
移動体間通信を用いることで、AT同士は協調動作をすることができる。それゆえ、接近中のAT同士が互いに通信して 衝突回避を行う研究や先頭の有人のATを無人のATが追尾する連携協調動作の研究 がこれまでに行われた。 また、アドホックネットワークの仕組みを用いて周囲のATとコミュニケーションを行うことが可能になるため、 ATを用いたコミュニケーション支援システム やAT搭乗時の体験を共有・再利用するシステム が構築された。
-
人間の日常生活において基本的な要素である「移動」そのものを支援するために、感覚機能を強化し障害物回避を 実現するといった、個体としての自律性を高める研究課題である。本研究の自動トランスポーテーションシステムは主にここに位置づけられる。
ATの個体としての自律性
以上のようにATは自身に搭載されたセンサ類や、AT間・AT-サーバ間の通信によって3種類のインタラクションとAT自身の自律性を 実現している。また、これらのインタラクションを通して獲得した情報を利用して、人間や環境への適応を可能にしている。
2.2 オムニムーバー
現在我々が開発中のATの特徴の一つは、全方位に移動ができることである。我々はそのような移動体を「オムニムーバー ~(OmniMover)」と呼んでいる。オムニムーバーは、アメリカ製の個人用移動体セグウェイのようにその場回転をして 任意の方位を向いてから走行するものでなく、静止状態からならばどの方位にもすぐに動けるものである。ただし、 既に動いている状態で任意の方向に動くためには慣性を考慮しなければならない。また、乗っている人間への加速度の影響も 考慮しなければならないため、動いている最中はすぐに動きたいと思う向きに動けるわけではない。
それでも、全方位に動くことが可能であるということは、これまでの乗り物とは違った動き方ができるということである。それは、 例えば障害物や人などの避け方に現れてくる。これまでの乗り物は、止まっている状態から真横に動くことができないため、 障害物や人間が乗り物の間近に接近してしまうと回避しきれずに衝突してしまう。
そこで我々の研究では、ロボットコンテストなどの競技用ロボットの分野で以前から導入されているオムニホイール という技術を採用した。オムニホイールの外観を図 に示す。 図 を見るとわかるように、オムニホイールは、車輪の回転方向と垂直の方向に回転する 複数の小型の車輪を合成した複合車輪である。この車輪を付けた物体は横滑りによって横方向に移動することができる。
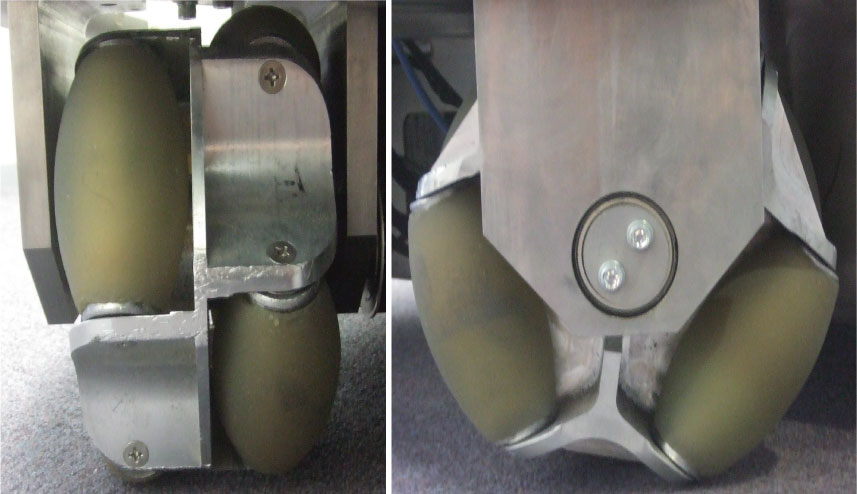
図2.2: オムニホイール
ただし、4個のモータ付きオムニホイールを使って全方位に動くことを可能にするため、モータのパワーを結構無駄に使わなけれ ばならない。そのためバッテリーの消費を考えるとあまり速いスピードを出すことができない。また、オムニホイールは弾力性に 乏しいので、振動や衝撃の吸収力が非常に弱い。つまり、この構成が乗り物として妥当かどうかは、さらなる工夫次第なのである。
2.2.1 全方位移動のメカニズム
全方位移動、およびその場回転は、図 のように非平行に配置された4個のオムニホイールを個別に制御することによって実現し ている。オムニホイールとベルトでつながれた高トルク(750w)のサーボモータは任意の速度制御が可能であり、またトルク を0にすることで空転させることができる。
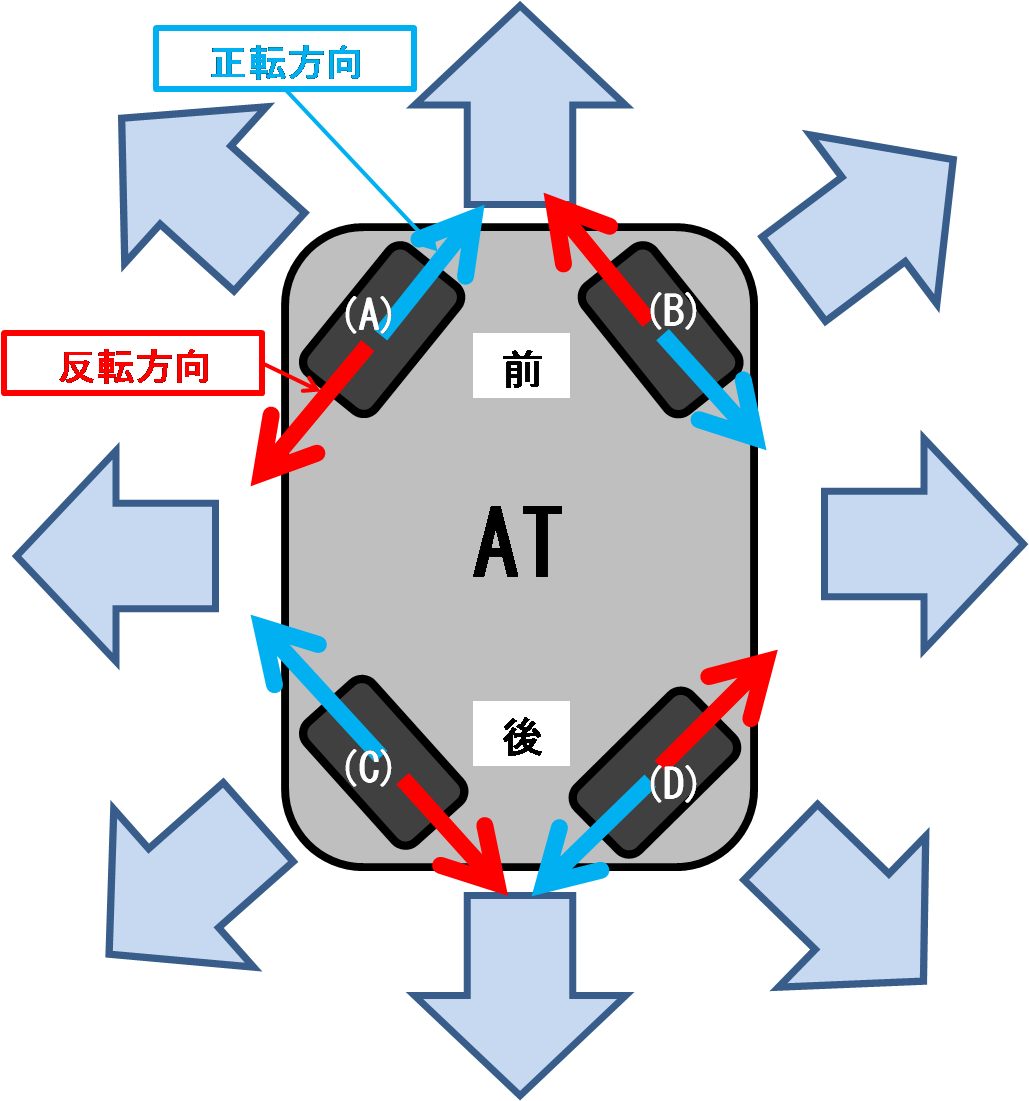
図2.3: 全方位移動のメカニズム
前後左右に動かすときは、4輪の回転速度を等速にして、それぞれの回転方向(正転か反転)を動く方向に合わせて調節する。例えば前方に動かす場合、 図 の(A)と(C)のオムニホイールを正転(図の正の向きに回転)させ、(B)と(D)のオムニホイールを反転 (図の負の向きに回転)させる。車体から45度角の方向へ動かすときは、その方向を向いている2個の車輪を同じ方向に同じ速度 で回転させ、それ以外の車輪は空転するようにする。それ以外の任意の方位へ移動するときは、4輪の回転速度と回転方向を細かく 調整する。これによって、図 のようなスムーズで柔軟な障害物回避移動が可能になる。 なおその場回転は、図 の(A)(B)(C)(D) 全てのオムニホイールを正転させたり、反転させたりすることで実現できる。
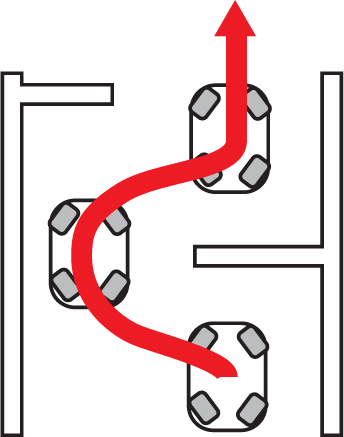
図2.4: 全方位移動による障害物回避
2.2.2 衝突回避と自動走行
本研究で用いるATには、全方位の障害物までの距離を測定するセンサが装備されている。そのため、ATは障害物を検知すると自ら 回避するように動作することができる。また、無線LANと赤外線通信を用いた移動体間通信によって複数の移動体が衝突しないよう に協調的に動かすこともできる。これらの仕組みによって、搭乗者の安全性を十分に考慮した走行が可能である。
また、ATは屋内では壁沿いを走行することによって、目的地まで自律的に走行することができる。この場合、位置測定が必要にな るが、位置情報を記録したRFIDタグと、モータの回転数から計算した走行距離を考慮することで誤差2m以内の位置を知ることが できる。さらに、この自動走行に地図情報と目的地の検索および位置に連動した情報案内の機能を追加したのが、次章で述べる 屋内自動トランスポーテーションシステムである。
2.3 システム構成

図2.5: 個人用知的移動体AT
現在我々の研究に用いるATの外観を図 に示す。ATの駆動系には2.2節で述べたように、 オムニホイールと高トルクのサーボモータが利用されており、車体はアルミ材で構成されている。 ATは屋外と屋内の両方で利用できるように、車体の幅を屋内の扉やエレベータの入り口を通り抜けることが可能なサイズに抑えられている。 人間は立った状態でATに搭乗する。ATの走行は、自動走行をしない場合、小型のリモコンを用いてコントロールする。これについては2.5節で説明する。
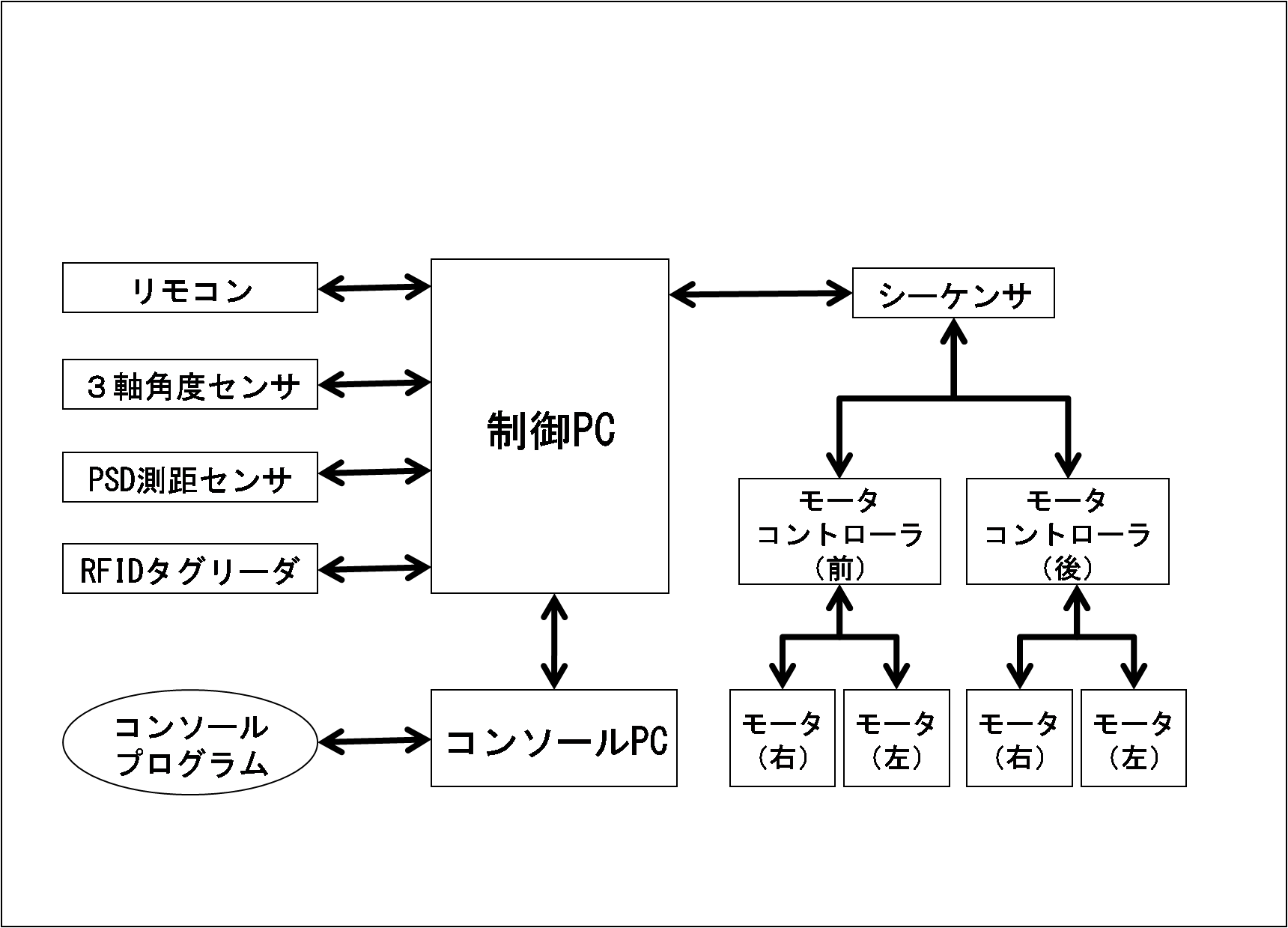
図2.6: システム構成
図 にシステム構成図を示す。 ATの制御には、制御用PCとコンソール用PCの2台のPCが用いられている。それぞれのPCの主な役割は以下の通りである。
-
制御用PC
ATの後方部、搭乗者の後ろに設置されたPCであり、ATの各種センサやリモコン、モータに繋がるシーケンサなどの制御系デバイス が接続されている。Javaを用いてセンサ情報を統括し、モータの制御を行う役割を担っている。
-
コンソール用PC
搭乗者の手元に設置されたPCであり、タッチパネルを備えている。このPCのディスプレイにJavaSwingで実装されたコンソール画面 が表示され、搭乗者はこの画面を見ることで走行状態を確認したり、画面をタッチすることでATに装備されたデバイスの電源のON/ OFFを切り替えたりすることができる。
次に、ATを構成する主なセンサ・デバイスとその使用目的についてを表 に示す。走行には小型のリモコンを用いて、速度や進行方向を決定する。 リモコンと制御用PCはBluetoothを用いて通信を行っている。操縦インタフェースについては次の2.5節で詳しく説明する。 また、ATには、4個のオムニホイールそれぞれとつながっているモータを個別に制御するための、モータ制御系のデバイスが 装備されている。 進行方向や速度の入力を制御PCがリモコンから受け取り、まずシーケンサに送る。 シーケンサは受け取った値から、各モータの速度を計算して求める。その結果を今度はモータコントローラに伝達し、 各モータのトルク調節を行うという仕組みになっている。モータコントローラはATに2つ装備されており、一方は前方の左右2つの、 もう一方は後方の左右2つのオムニホイール用モータの出力トルクを制御している。
|
センサ・デバイス名 |
使用目的 |
|---|---|
|
3軸角度センサ |
車体の傾斜角や回転角を測定する |
|
PSD測距センサ |
近距離にある対象物との距離を測定する |
|
RFIDタグリーダ |
環境に設置されたRFIDタグから情報を取得する |
|
シーケンサ |
ATの進行方向や速度から各モータの速度を計算する |
|
モータコントローラ |
シーケンサに指定された速度に合わせてモータのトルクを調節する |
|
リモコン |
ATを操縦する |
|
赤外線LED |
リモコンによるATの遠隔操作に用いる |
|
ネットワークカメラ |
映像の取得・配信を行う |
ATの車体の向きを測定するためのセンサとして3軸角度センサが装備されている。このセンサによって、坂道などでの車体の傾き や回転角を推定することができる。物理的環境へのアクセス手段として利用されるセンサとしては、PSD測距センサとRFIDタグ リーダが搭載されている。これらのセンサを用いることで、移動に伴う環境の変化に応じて暗黙的に情報を獲得することができる。
以上で解説したものの他に、ATには赤外線LED装置が車体の前後左右斜め方向の計8方向に装備されている。1つの装置から赤外 線を2本発していて、リモコン側に装備されたデコーダがその赤外線を2つの点として観測する。デコーダが観測した赤外線の2 点間の距離によってリモコンとATとの間の距離を推測することができる。さらに、赤外線にIDをのせて通信するため、デコーダは 受信した赤外線によって、どの赤外線LED装置から発せられた赤外線なのかを区別することが可能である。この仕組みを利用して、 リモコンを用いた非搭乗時のATの遠隔操作を実現した。外側からATにリモコンを向けると、ATはリモコンがどの方向にあるのかを 認識して、リモコンの方向に近づいてくる動作をする。ATはリモコンとの距離をある一定の距離間隔に保とうとするので、リモコ ンとの距離が遠いと近づき、逆に近いとリモコンから離れる動作を行う。
また、ATは移動体であるため、このように多くのセンサ・デバイスを装備しても、搭乗者である人間に負担をかけることはない。 むしろ、できるだけ多くのセンサから獲得した情報に基づいて実世界の状況を認識し、 物理的な行動に反映することで、人間の行動をより適切に支援することを目指している。
2.4 ネットワークに関する機能
ここでは、ATの特徴の一つであるネットワークの基本システムについて述べる。ATにおけるネットワーク構成図を 図にATにおけるネットワーク構成図を示す。
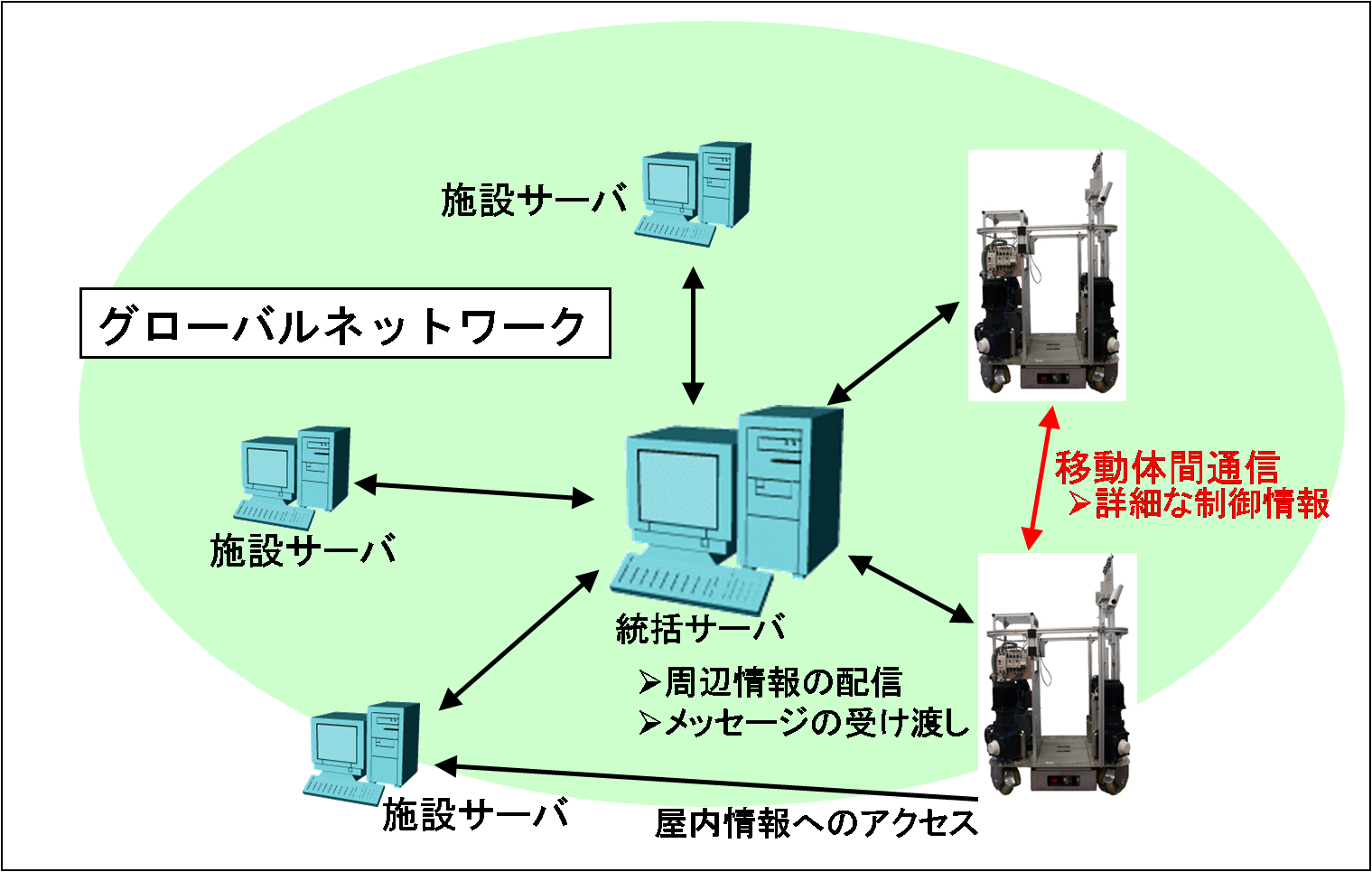
図2.7: ATにおけるネットワーク構成図
ATにおけるネットワークでは、グローバルネットワークを想定しており情報配信を行うサーバの存在が前提となっている。 このサーバは、ある特定の地域を統括するような形での存在を想定しており、AT間通信の基盤を提供するとともに、 サーバクライアント型のアプリケーションを提供する。統括サーバ以外には、例えば美術館や病院のような施設単位で、 情報を配信するサーバが複数存在している。
ATにログインすると、統括サーバとのコネクションが確立され、情報配信を受けることができるようになる。 統括サーバは、コネクションを確立しているATや、施設サーバの情報を収集し、配信するATの位置情報を考慮したうえでリストを作成し、配信する。 この仕組みにより、近くにいるATの情報や施設の情報を容易に取得することが可能である。もちろん、他のATに対してメッセージを送信したり、 複数のATに対して情報をブロードキャストすることもできるようになっている。
また、ATは個体間通信によってAT同士や搭乗者同士の情報交換を行うことができる。例えば、AT同士の連携動作に関する制御情報や搭乗者間における メッセージのやりとりなどである。個体間通信では、目的や通信対象との距離に応じて、サーバを介した無線LAN通信、 無線アドホック通信、 PSD-IRアレイによる赤外線通信が自動的に切り替わり、状況に応じて使い分けられる。遠隔にあるATと情報交換を行う場合は、サーバを介した通信が 適している。それに対して、AT同士の衝突回避などの即時性を求められる場面では、暗黙のうちにAT間のコネクションに切り替わることで対応する。
2.5 操縦インタフェース
ATに乗った搭乗者から見た、コンソールPCのディスプレイとリモコン差し込み型ハンドルは図 のようになっている。

図2.8: ATの操縦系
ATは手でリモコンのボタンを押して操作する乗り物である。将来的には、AT利用者は全て自分専用のリモコンを所有しており、AT に乗る時には図 のようにハンドルに差し込み、ATから降りる時にはリモコンを抜くというシステムを想定している。なぜなら、 リモコンに自分の嗜好やAT操縦歴などを蓄積していくことで、向かう場所や走行速度などを搭乗者によってカスタマイズすること ができるからである。また、搭乗者の利き手が左右どちらでも対応できるよう、リモコンはどちらのハンドルにも差し込めるよう になっている。走行中、搭乗者はこのハンドルを握りながらリモコンのボタンを押す。
リモコンとコンソール画面についての詳細はそれぞれ図 の通りである。リモコンには十字キーとプラス・マイナスボタン そしてAボタンがある。それぞれのボタンには以下のような機能がある。
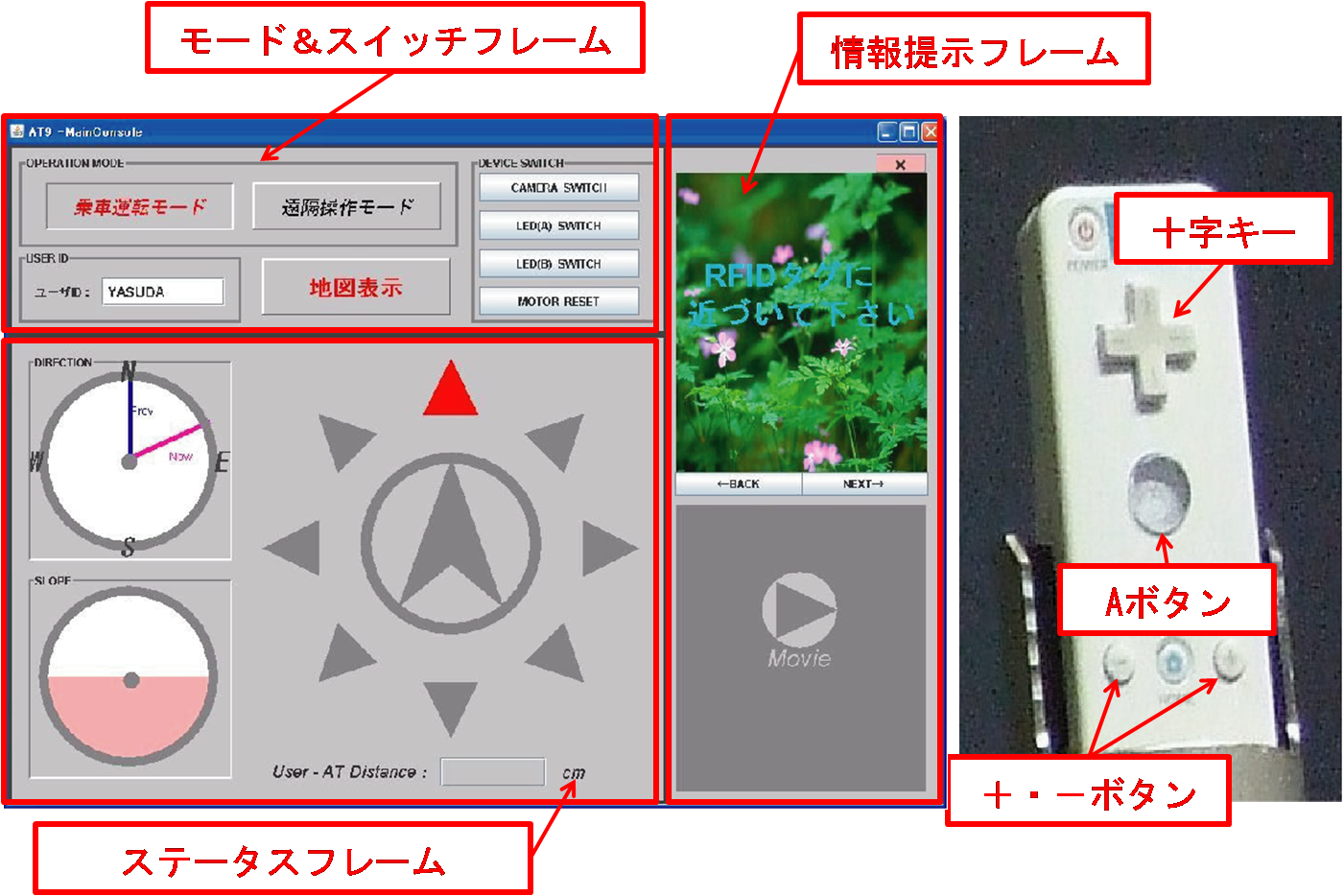
図2.9: コンソール画面とリモコン
-
ATの8つの進行方向を指示する。十字キーとATの進行方向の対応は直観的で、十字キーの「上」を押すと前進し、「下」を押すと 後退する。斜め方向を指示するときは十字キーの2つの方向を同時に押す。例えば、ATを右斜め前方向に走行させたい場合は、十 字キーの「上」と「右」を同時に押す。また、十字キーを押している間ATは動き続け、手を離すとATは停止する。
十字キー
-
プラス・マイナスボタン
ATの回転方向を指示する。プラスボタンを押すとATは時計回りのその場回転を行い、マイナスボタンを押すとATは反時計回りのそ の場回転を行う。また、ボタンを押している間ATは回転し続け、ボタンから手を離すとATは停止する。
-
ATを緊急で停止させるときに押すボタンである。同時にモータへの出力をリセットする。
Aボタン
次に図 のコンソール画面の内容について説明する。コンソール画面は、「モード&スイッチフレーム」「オペレーションフレ ーム」「RFIDタグによる情報提示フレーム」の3つのフレームで構成されている。それぞれのフレームには以下のような機能が ある。
-
モード&スイッチフレーム
モード表示は通常「乗車運転モード」であるが、リモコンにデコーダが接続されると「遠隔操作モード」に切り替わる。ユーザID には搭乗者のIDあるいは名前が表示される。またフレーム中央の「地図表示」ボタンをONの状態にすると、「オペレーションフレ ム」が「地図フレーム」に変わる。「地図フレーム」は次章で述べる屋内自動トランスポーテーションを行う際に用いるフレーム である。詳しくは第4章で述べる。フレーム右側のスイッチ類はATに装備された、カメラや赤外線LEDの電源のON/OFFを切り替えを 行うためのものである。
-
ステータスフレーム
中央の8つの三角形(矢印)とそれに囲まれた矢印付き円はリモコンによる操作と同期している。例えば、リモコンの十字キーの 「上」を押すと、図 のように上向きの三角形が赤く点灯する。またプラスボタンを押してATを回転させると、中央部の矢印付 き円が赤く点灯し、ATと同じように回転する。この表示によって、搭乗者が視覚的に現在のATの動きを認識することができる。 フレーム左側の2つのメータ「DIRECTION」と「SLOPE」はそれぞれATの向きと傾きを表す。ATが回転動作中「DIRECTION」メータは 回転前の方位と現在の方位を同時に表示し、どのくらいの角度回転したのかを一目で把握できるようになっている。
-
情報提示フレーム
ATはRFIDタグを読み取ると、そのIDに対応付けて登録された情報を提示する。情報は画像と動画の両方で提示される。フレームの 上段に画像を表示し、下段で動画を再生するようになっている。画像表示部をクリックすると画像の拡大表示が可能である。この フレームの使用例は第4章で詳しく説明する。
3 屋内自動トランスポーテーション(IAT)
前章では、全方位移動可能な個人用知的移動体(AT)について述べた。ATは自身に装備されたセンサを用いて障害物を回避し、移 動体間通信及びサーバとの通信によってAT同士の衝突を回避する。すなわち自律的かつ協調的に動作することが可能である。本研究では、 ATの特徴を活かした、建物内において搭乗者である人間を目的地まで自動で移動させる技術、屋内自動トランスポーテーション ~(Indoor Automatic Transportation:以下ではIATと表記する)を提案する。また前章で述べたRFID~(Radio Frequency Identification)タグと PSD~(Position Sensitive Detector)センサをATに装備してIATを実現した。 本章では、IATについて及びATによるIATの実現方法について述べる。
3.1 自動トランスポーテーションとは
目的地の場所あるいは目的地までの行き方がわからない場合、我々はまず地図情報を取得する。その地図情報から目的地と現在位 置を把握し、それらを結ぶ最適な経路を見つけ出す。次に、現在の自分の周りの空間と地図情報を照合して進行方向を決定する。 その後は、時々刻々と変化する周囲の状況において、 進路上にある障害物や接近する移動体や人など身に迫る危険を回避しながら移動する といった、いくつかのプロセスを踏んで目的地に到達するのである。 これらのプロセスを人間の代わりに移動体が自動で行うのが自動 トランスポーテーションである。つまり、移動体が人間を乗せて自動で走行し、搭乗者の目的地まで連れていくのである。移動体 が自律的に目的地までの経路を判断して、その経路を自動で走行するため、人間は移動体に搭乗して目的地を指定するだけで、そ れ以外のことは何もしなくても迷わず安全にその目的地まで行くことが可能になる。
カーナビゲーションシステムをはじめとする近年開発・実用化が盛んなナビゲーションシステムは、目的地までの道案内を行うこ とで移動する人間を支援する。また原動機付自転車や電動車椅子などの現在広く利用されている小型の移動体は、個々の人間の物 理的な移動そのものを支援する。それらに対して個人用知的移動体による自動トランスポーテーションシステムは、「情報的な 支援」と「物理的な支援」という上記2つの人間の移動に関する支援を同時に行うシステムであると言える。
近年、大規模な屋内施設や高層ビルが急増しており、建物内の構造も複雑化している。そのため、建物まで到達してもその建物内 のどこに最終的な目的地があるのかわからない場合がある。それゆえ、自動トランスポーテーションシステムは屋外と屋内の両方 で実現することが望まれる。しかし、屋外自動トランスポーテーションと屋内自動トランスポーテーションでは、その在り方や仕 組みが異なるため同一のシステムとして扱うことは難しい。例えば、屋外で利用可能なGPS~(Global~Positioning~System)が屋内 では利用不可能であるという測位方法の違いがある。また、移動の粒度が異なるため移動体の制限速度や測位精度の許容誤差範囲 などにも屋外と屋内で違いがある。自動トランスポーテーションシステムは屋外用と屋内用に分けて扱うべきであると考え、屋外 自動トランスポーテーションによって目的の建物まで到達した後、建物の入口でシームレスに屋内自動トランスポーテーションに 切り替わるという仕組みを理想としている。
本研究では屋外用と屋内用との2種類あるシステムのうち、屋内での自動トランスポーテーションに焦点を置いている。以降では、 屋内自動トランスポーテーション~(IAT)について話を進めていく。
3.2 IATの必要性
目的地を目指して移動する人にとって本来の目的とは、目的とする場所で何かをすることであって移動そのものではない。 それゆえ、人々は移動する際にかかる時間や労力といったコストや、身に降りかかる危険性を可能な限り 小さくしたいと考えるだろう。
個人用知的移動体によるIATシステムは、「新しい屋内ナビゲーションとしての側面」と「新しい屋内の移動体としての側面」と いう2つの面をもっている。以下では、この2つの観点においてこれまでに開発・実用化されてきたシステムと比較し、IATの必 要性について詳しく述べる。
3.2.1 フロアマップとの比較
現在の大規模な屋内施設では屋内ナビゲーションのために、建物内にフロアマップやサインを設置している。フロアマップを見れ ば、目的地の位置や現在位置から目的地までの経路を把握することが可能である。しかし、フロアマップは各フロアに数個 程度しか設置されておらず、その位置も固定されている。そのため、我々は目的地までの行き方がわからない場合、まずフロアマップを探し 当てることから始めなければならない。天井から吊り下げられたサインも、 一般に、洗面所やエレベータなど多くの人々が目的とする場所への道案内に過ぎない。
他に、近年開発中の屋内ナビゲーションとして、携帯電話をはじめとする携帯情報端末を利用したシステムがある 。 屋内で道に迷った場合、我々は携帯電話を用いて情報ネットワークにアクセスし、現在居る建物の地図を取得する。そして携帯電話の ディスプレイに表示された地図を見ながら目的地まで移動するのである。ここで問題なのは、携帯情報端末を閲覧・操作しながら の移動が大変危険だということである。我々は携帯情報端末の画面を見るとき一般に下を向いているため、移動していると目前の障 害物や人の存在に気づかず衝突することが十分に考えられる。さらには、情報端末からの情報に気を取られ過ぎて、身近にある重 要な情報を見落とす可能性もある。
また、フロアマップと携帯情報端末のどちらのナビゲーションシステムを用いても、地図と実際の状況を照合し現在位置や目的地 を見失うことなく移動するには、我々の空間把握能力が必要となる。本システムはこのような課題を解決するだけでなく、搭乗者 が移動中に移動とは直接関係のない行動をすることも可能にするのである。
3.2.2 他のデバイスとの比較
現在既に実用化している人間の物理的な移動を支援するシステムに、動く歩道やエスカレータ、エレベータがある。しかし、これ らのシステムは設置場所が限られており、個人に適応して各々の目的地まで人間を移動させるものではない。我々の目的地までの 移動を部分的に支援するシステムに過ぎないのである。そのため、現在の屋内での移動は歩行が中心で、大規模な屋内施設の中を 移動することは高齢者、身体的なハンディキャップのある人にとって大きな負担となっていることが考えられる。
IATは、移動体に乗るだけで我々を目的地まで移動させるシステムなので、そのような歩行を負担と感じる人々を支援することが 可能である。普段は歩行を負担に感じない人にとっても、重い荷物を持っているときや疲れているときなどにIATは有用であろう。
以上のことから、本システムは素早く安全に、そして楽に目的地へ移動したい人にとって有効なシステムであると言える。
3.3 IATの実践例
本システムが有効に機能 する屋内施設の一つの例として、総合病院が挙げられる。来院する患者が病気や怪我のため、自力で歩行 することが困難な場合には移動体の利用が望まれる。また、病院内にはたくさんの部屋があるため、どこに何の部屋があるのか把 握できずに迷いやすい。さらに、病院内のどの診療科に行くべきなのかを決めかねる患者も多い。
そこで、大規模な総合病院で本システムが利用された場合を考える。まず、患者がATに乗って来院するとATのディスプレイに問診 票のような患者の症状を入力する画面が表示される。その画面上で患者が入力した症状をシステムが解析し、その患者が向かうべ き診療科あるいは医師を決定する。同時に、その診療科やその医師の所に目的地が自動で設定される。患者がシステムの決定に納 得した場合はそのまま自動走行を開始し目的地までの移動を行うが、患者がシステムの決定に納得しない場合はATの通信機能を用 いて医師と直接対話し最終的な診療科の決定を行う。また患者は診察室までの移動中、今向かっている診療科の医師の情報や現在 の混雑状況や待ち時間といった患者にとって有用な情報を取得することができる。
病院では診察後に「処置室に行ってください」「調剤室に行って薬を受け取ってください」「受付でお支払をお願いします」など 次々に向かう場所を医師や看護士に指示されるため、広い病院では患者が混乱してしまうことがある。しかし、IATシステムを用い れば、医師や看護士が各患者の乗るATに、その患者が向かうべき場所を順に全て設定してくことが可能である。向かう場所が設定 されたATが患者を自動で移動させるので、患者は病院内で迷って混乱することなく円滑に用事をこなすことができる。
このようにIATシステムは、総合病院で患者を迷わせず快適に、そして症状に応じた専門の医師がいる診察室へと 連れていくときに有益だと考えられる。
3.4 IATの実装
本研究では、全方位移動が可能な個人用知的移動体ATを用いたIATを実現した。IATとは、屋内での安全な自動走行システムに、 地図情報と目的地検索機能および位置に連動した情報案内機能を追加したシステムのことである。ここでは、実際に屋内でどの ように移動経路を決定し、どのようにその経路に従い自動走行をするのかについてや、そのために必要な地図情報とはどんな 情報なのかについて詳しく述べる。
IATのメカニズムを述べるにあたり、まず基本となるのがPSD~(Position Sensitive Detector)センサを用いたATの壁沿い自動走行 である。本研究での自動トランスポーテーションは屋内での利用を対象としている。そのため、ATに装備された障害物までの距離を測定 するPSDセンサで常に壁を検出して、壁からの距離を一定に維持しながら走行するようになっている。これは、壁に沿って進むことで地図との 対応を取りやすくするためであり、屋内では精度が高い測位ができないという問題を解決する。 さらに、壁に沿って走行するだけでは地図上での位置が把握できないため、壁に位置を知るためのランドマークとして RFID~(Radio Frequency Identification)タグを設置した。このRFIDタグを読み取りながら走行することで、ATは自身の の位置を知ることができる。
このようにATは、RFIDタグをAT自身の位置や目的地の場所を把握する際の手がかりとしているため、各部屋の入口や階段、エレベ ータ付近の壁には必ずRFIDタグが設置されているものとする。例えば、搭乗者が101号室を目的地に設定したとすると、 ATは101号室の入口付近に設置されたRFIDタグの位置を目的地と認識する仕組みになっている。 以降では、図 に示すようにATが開始位置から目的地まで人間を乗せて自動走行する場合を考え、その手順に従ってIATの全体像を説明する。
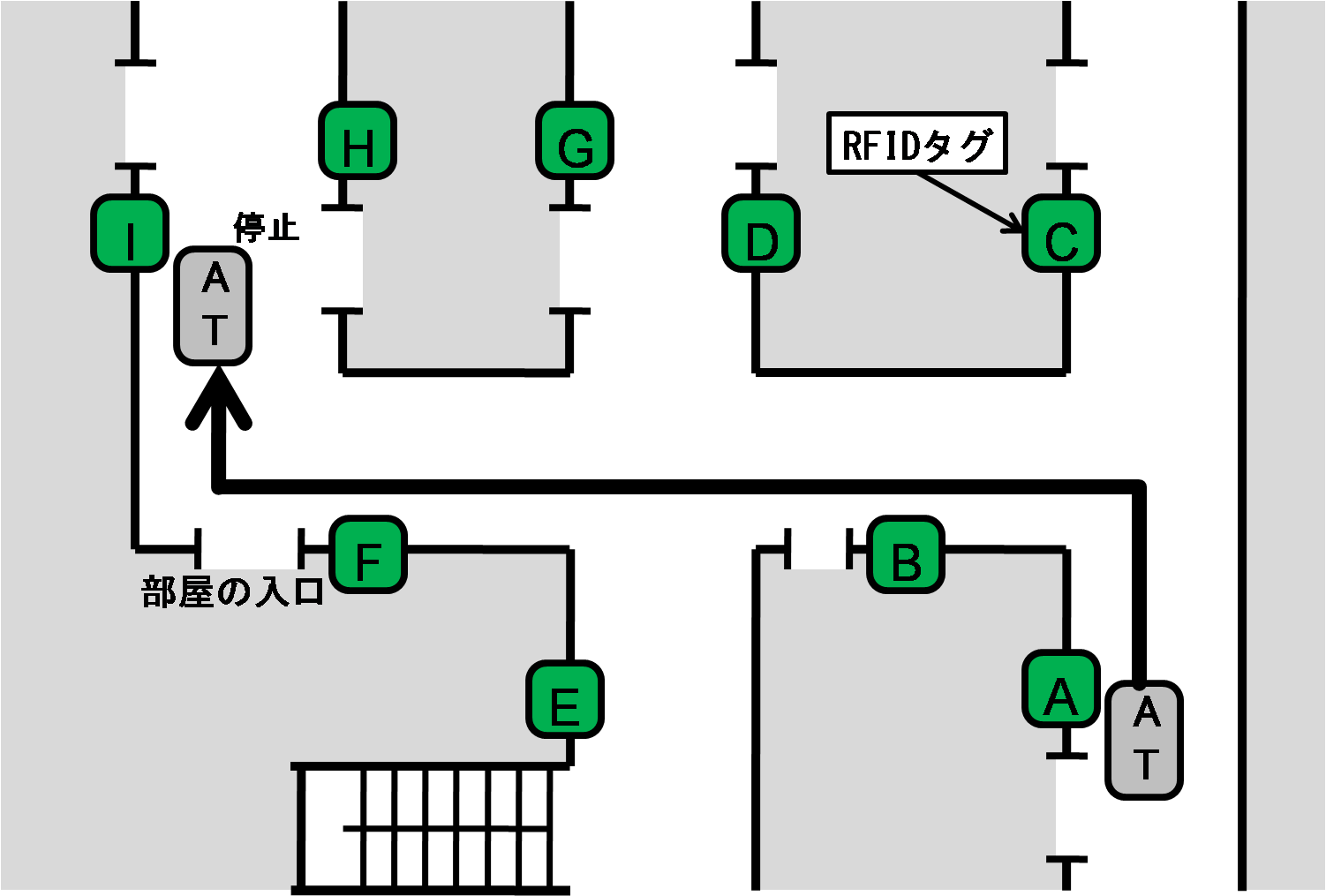
図3.1: 屋内地図
3.4.1 屋内自動走行の流れ
本システムの要となるのが、目的地までの自動走行である。 現在、屋内自動走行を実現している乗り物に動く歩道やエスカレータ、工場内で物を自動運搬する移動体やテーマパークの アトラクション内で稼働する移動体などがある。しかしこれらの乗り物は、「設置されたレールの上を移動体が動く」 あるいは「動きを完全にシステムが管理する」という考え方で作られているため、一度自動走行を開始すると終了地点に達 するまで進行方向を変更したり、任意のタイミングで停止させたりすることができない。物ではなく、人間が搭乗する移動体である ことを考慮すると、人間の意志の変化に合わせて自動と手動を柔軟に切り替えられる仕組みが望まれる。 そこで、我々は「周囲の状況を把握しながら自律的に動くよう移動体を賢くする」という考え方に基づき、 床や天井に移動を補助するレールを設置することなく、搭乗者や周囲の状況に柔軟に対応する自動走行を実現した。ここでは屋内自動走行を どのように実現したのかについて述べる。
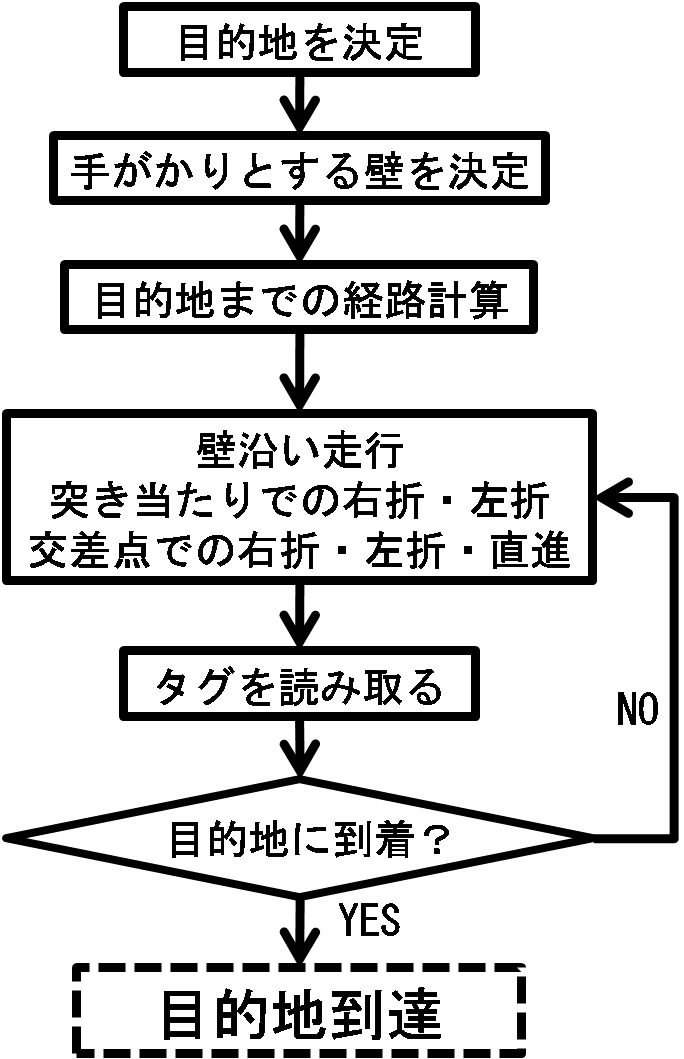
図3.2: 屋内自動走行の流れ
まずATが建物の入口を通過すると、その建物にあらかじめ用意されたサーバから建物内の壁の様子とRFIDタグの設置場所 の情報を取得する。搭乗者が目的地を決定すると同時に、ATは目的地のタグを把握する。 搭乗者が目的地を決定する時に、ATが周囲に設置されたタグのいずれかを読み取っている場合、ATは今後壁沿い走行の手がかりと する壁を決定することができる。図の例では、目的地設定が完了した地点、すなわちIAT開始位置 で「タグA」を読み取るため、今後は「『タグA』が設置された壁に沿って走行すればよい」ということをATが認識する。 一方、IATは搭乗者の任意の場所から開始することを考慮すると、IAT開始位置でどのタグも読み取っていない場合も考えられる。 その場合は、直前に読み取ったタグの位置とオムニホイールの制御履歴により、ATの現在位置から最短距離にある壁を推定する。 建物の入口にはタグがあり、屋内での走行であることを考えるとIATを開始する前にどこかのタグを読み取っていることが予想される。 そのためIAT開始直前に読み取ったタグの位置からの走行距離を考慮することで、近くにある壁を推定することが可能である。 その後、推定した壁に向かって走行して壁を検出したら、次はタグの位置を推定する。推定した通りに走行しタグを発見した時、 ATは現在位置と今後壁沿い走行の手がかりとする壁を把握することができる。
目的地と現在位置を取得したら、次にATは現在位置から目的地までの経路を計算する。この経路計算 はグラフ構造のパス探索手法に基づいて行う。 タグの位置と壁の関係があらかじめ地図として与えられているため、タグをノードとしたグラフを考え、エッジには壁の状況から判断したコストを 加える。図の場合を考えると、「タグA」から「タグB」までは壁に沿って走行するためタグA-B間のエッジ に付与されるコストは小さく、タグB-F間やタグD-G間のように壁に沿った走行が不可能な場合には、そのタグ間のエッジに付与されるコスト は大きくなる。この手法を用いることにより、現在位置から目的地までの壁沿い走行に最適な経路を算出することができる。
その後は目的地のタグを読み取るまで、周囲のランドマークとしてのタグを読み取りながら壁沿い走行や突き当たりでの右折・左折、屋内 交差点での右折・左折・直進 を繰り返す。最終的に、目的地のタグを読み取った時にATを停止させ、ATは目的地に到着したことを搭乗者に伝えて自動トランスポーテーションを終了する。
3.4.2 屋内地図情報
IATを実装する際の基盤となるのが、屋内の地図とそれに付随する多くの情報である。ATが自動走行するために必要不可欠な地図 情報は以下に示す2つの情報である。
-
建物内の構造情報
部屋と廊下を仕切る壁の状況が明確に判断できる各階のフロアマップのことである。 RFIDタグが設置されている所にはタグマークを表示する。この地図によってATは壁の状況を把握する。
-
RFIDタグの位置とID
地図上のRFIDタグの設置位置を表す「x座標」「y座標」、高さを表す「階」と「タグのID」、この4つの値をセットにした 情報がタグを管理するために必要となる。またこの情報によって、ATはタグを読み取った時の自身の現在位置を認識する。地図上の 座標の原点はエレベータや階段などの各階に共通する位置に設定する。そうすることによって、各階でフロアの形が異なる建 物においても建物全体を統轄する空間座標の原点を決定することができる。
まずATは、1つ目の「建物内の構造情報」から壁の状況を把握することができる。自動走行開始位置と目的地の位置を知ることができれば、 「建物内の構造情報」と2つ目の「RFIDタグ」の情報とを組み合わせ、グラフ構造の探索手法を用いることで、ATは開始位置と目的地を 壁沿いに結ぶ経路を求めることができる。同時に「経路を構成するタグの通過順」を決定することか可能である。「経路を構成するタグの通過順」とは、 自動走行開始地点のタグから目的地のタグまで、どのタグをどういう順番で読み取りながら走行していくのかという情報である。例えば、図 の場合、開始地点が「タグA」目的地が「タグI」であるから、それらを壁沿いに結ぶ経路を構成するタグは「タグA」「タグB」 「タグF」「タグI」であり、それらの通過順は「タグA→タグB→タグF→タグI」の順番であるという情報になる。この情報がATの目的地までの 経路を決定する。
3.4.2.1 屋内地図情報の取得
先に記した屋内地図情報は、AT自身が常に保持しているのではなく、「施設サーバ」と呼ばれる建物ごとに用意されたサーバが管理している。 ATは建物の入口を通過する時に、その建物の施設サーバと接続し通信を開始する。それ以降建物内にい る間ATは、常に施設サーバと通信可能な状態を維持し続けるが、ATが建物から外へ出たならばその接続は切断する。また、施設 サーバは建物内にいるすべてのATと通信し、全ATの動きを把握することが可能である。各ATと施設サーバの通信形態は 図のようである。
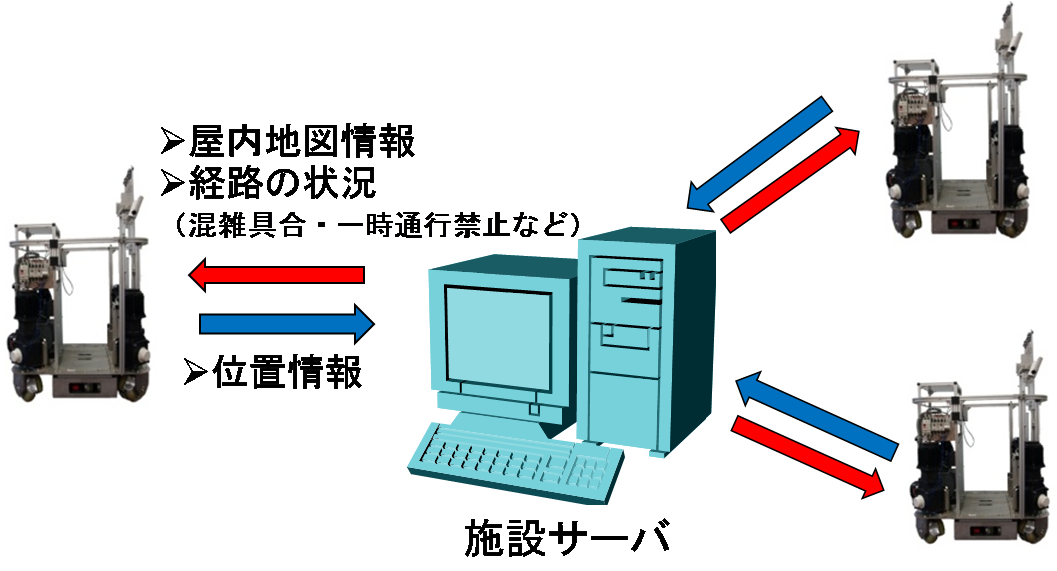
図3.3: ATと施設サーバの通信形態
建物内の全ATの動きを施設サーバが把握することによって、ATで混雑している通路とそうでない通路を判断す ることができる。また、近い将来混雑するであろう通路を予測することもできる。それゆえ、多くのATが同じ通路に集まらな いよう事前に各ATに通知を行うことが可能である。さらに、物が置かれて一部の通路が通行不可になったとしても、サーバの 情報を変更するだけで、すべてのATがその通路を通らないようにすることができる。 現在世の中に広く普及しているカーナビゲーションシステムは全地図情報をあらかじめ各車が保持しているため、渋滞の発生や道 路工事中といった動的な情報を瞬時に取得することができない。屋内では屋外に比べ通路が狭いので混雑が起きやすく、通 路に何かが置かれて通れなくなることも多いため、時間と共に変化する動的な情報の取得が重要となる。
複数のATが同じ場所に集まらないようにすることは、AT同士の衝突を防止することに繋がると考えられる。これまでに研究された AT同士の衝突回避方法は、制動距離範囲内に複数のATが近づいた場合にAT間で通信して速度制限や動作停止などの回避動作を行い、 双方の搭乗者に衝突の危険性があることを通知するという方法であった 。IATの場合はATが自動で走行している ため、AT同士が近づいてから衝突回避を行うのではなく、将来すれ違うであろうATも予測して事前に速度や経路を調整するといっ たより広い範囲の視野で衝突回避を行うことが望まれる。施設サーバが全ATの動きを管理すれば、このようなIATならではの衝突回 避が可能である。
3.4.2.2 目的地の検索と設定
IATにおいて自動走行を開始する前に搭乗者が必ず行わなければならないのが、目的地の検索と設定である。目的地を目指して移動 する人にとって重要なのは、目的地へ行くことではなくその場所で何をしたいかである。それゆえ、搭乗者の目的で目的地を検索 する方法が最適であると考えられる。しかし、搭乗者の目的は建物によって大きく異なるため、最適な検索方法も建物によって異 なる。そのため一般的な目的地検索手法を定義することは難しい。ここでは、建物内の最適な目的地検索について例を2つ挙げて 説明する。
1つは、大学の研究施設内で目的地を検索する例である。大学の研究施設を訪問する人の目的として考えられるのは、「その研究 施設に所属する人と面会すること」「荷物を運び出すこと」「講演・会議に参加すること」などである。人と面会するために来た のであればその人がいる場所を検索する必要があり、荷物を取りに来たのであればその荷物がある場所を検索する必要がある。こ のように人やモノ、講演や会議の名称で検索し目的地を決定する方法が大学の研究施設内の目的地検索の最適な方法であると考えられる。 また検索する際、人の名前や顔はわからないが「××科の○○担当」のようにその人の属性はわかっている場合や、講演名はわからな いが講演者や講演内容はわかっている場合がある。そのような場合でも人や講演の属性で絞り込み、特定しやすくする仕組みにすべ きであろう。
もう1つは、病院でIATが利用される場合の目的地決定の例である。病院に来院する人の目的は病気や怪我を治すことであるため、 病院では自身の症状を表現すれば目的の医師や診療科は自ずと決まる。それゆえ、目的地設定時に問診票が表示され、それに答 えて自身の症状を入力すれば、適切な診療科や専門医師、診察までの待ち時間などを自動で決定してくれるシステムが最適であ ると考えられる。病院という場所においては、目的を入力して目的地が決まる検索方法が適している。
3.4.3 壁沿い自動走行
現在位置情報を知るシステムとして最も一般的なのものがGPS~(Global~Positioning~System)である。しかし、GPS衛星から発信され る電波は、建物などにぶつかって屈折・反射するため建物の中での位置測定は困難である。屋内での位置測定手法としては、無線 LANを用いた方法 があるが、壁や家具など障害物が多い屋内環境で、電波は屋外の場合以上に屈折・反射をしてしまう。 さらに、屋内では様々な電磁波が飛び交うため電波はそれらと干渉し合うことも多く、無線LANによる正確な位置測定は困難を極め る。他の屋内位置測定手法に、超音波センサを用いた方法 もあるが、この方法では超音波を受け取る受信機を環境側 に数多く設置する必要があるため非常にコストがかかる。
地図が与えられていても自分の位置が正確にはわからないATは、真っ暗で何も見えない建物の中を照明を使わずに歩く我々と同じである。 その場合我々は、進む道がどのような状態になっていて、どうのような危険が待ち構えているのかわからないため、まず自分の 周りに何かないか腕を広げて探ってみるだろう。そして、もし壁らしきものが見つかったらそれを手で触りながら、壁に沿っ て注意深く進んでいくだろう。この方法が何も見えない中での最も安全な移動方法であるからだ。ATにとっても同じで、 自身の位置が把握できない場合、壁に沿って進むことで地図との対応が取りやすくなるのである。しかし、壁に沿って進んでい ても何かランドマークがないとATは自分が地図上のどの辺りの壁付近にいるのかわからない。また、自身の目的としている場所 の位置もわからないままである。そこで、そのランドマークとなるものとして軽量で電源を必要としないRFIDタグを壁に設置し、 それを読み取ることでATが地図上での自身の大体の位置を知ることを可能にした。
屋内ならではの壁を利用した壁沿い走行とランドマークとしてのRFIDタグ、これとモーターの回転数から計算した自身の移動距離、 これらすべてを考慮することで誤差2m以内で位置を知ることができる。では、RFIDタグの機能はどのようなものか、実際に壁沿い走 行はどのように行われるのかについて次に述べる。
3.4.3.3 RFIDタグによる位置推定
RFIDタグは縦2.5cm、横10cmの長方形の紙のような形状をしている。非常に計量で電源を必要としないため、壁沿い走行中の 位置把握を目的として壁にいくつか設置しても環境側にかかるコストは低い。また、RFIDタグは基本的に各部屋の入口や階段、 エレベータ等の付近の壁に設置する。これはATがRFIDタグを自身の位置を知るランドマークにしているだけでなく、目的地を 知るためのランドマークにもしているためである。さらに、タグをできるだけ自然な形で設置するため、将来的には各部屋の 表札に埋め込むことを想定して床から高さ1.3m程度の位置に設置する。
壁沿い走行する際のランドマークとなるRFIDタグは壁に設置されていることが望ましい。それゆえ、そのタグを読み取るための タグリーダは壁の方向を向いている必要がある。そこで、ATの前方に1つ、後方に2つで計3つのタグリーダを図 のように ATに装備した。タグリーダを装備する高さは、壁に設置されたタグの高さと同じである。また、ATは自身から見て左右にある 壁のどちらかに沿って走行する場合が多い。ATが走行中に読み飛ばすタグを減らすために、後方の2つのリーダのタグ読み取り 可能範囲を前方のリーダのそれに比べてやや広く設定した。3つのタグリーダはそれぞれ固有のIDをもっており、どのリーダ ーがどのIDをもつタグを読み取ったのかを判別することが可能である。
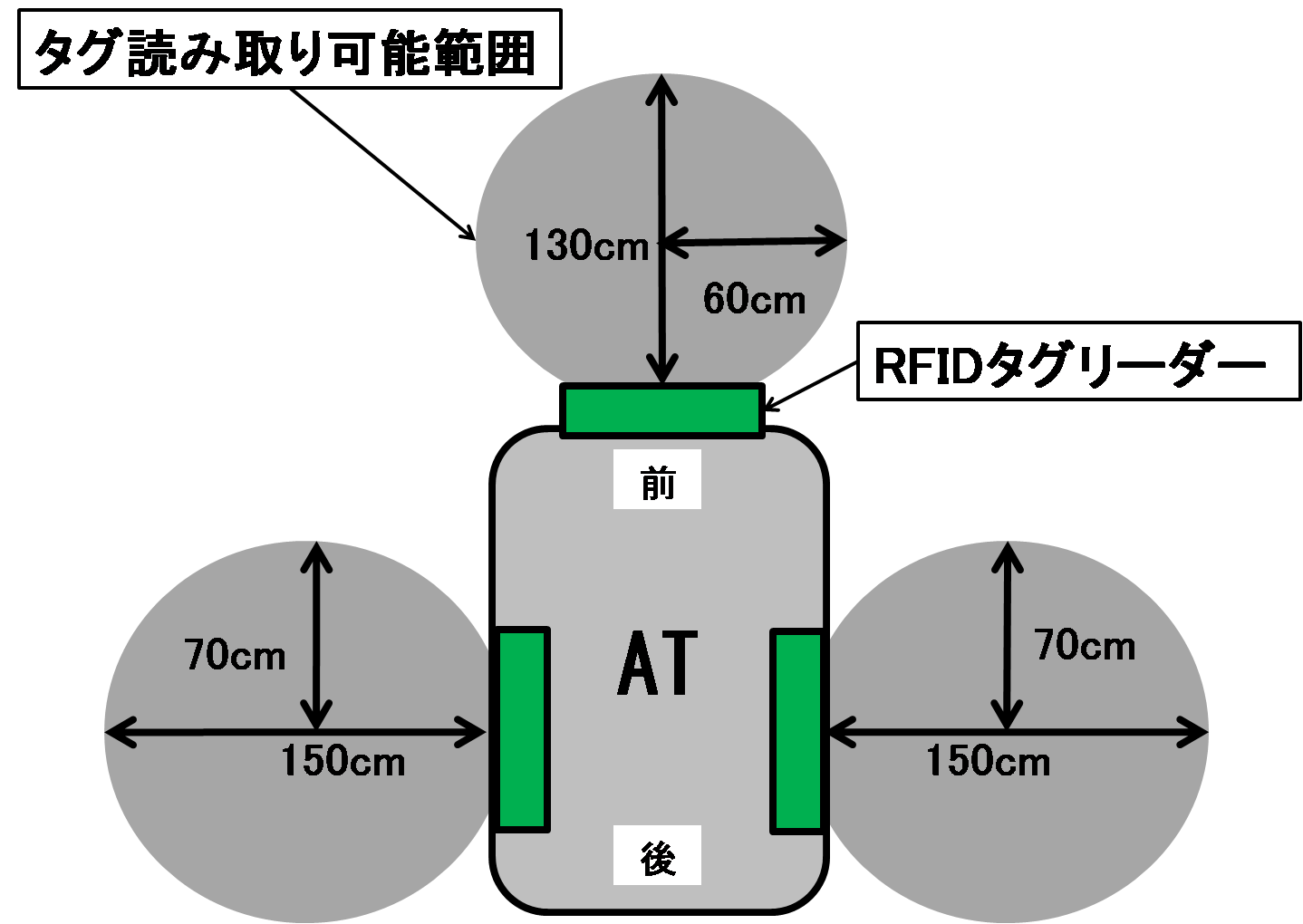
図3.4: RFIDタグリーダ
3.4.3.4 PSDセンサによる壁沿い自動走行
1mの範囲で障害物までの距離を測定可能なPSDセンサ12個をATの前後左右に装備し、壁との距離を常に一定に保ちながら走行 する壁沿い走行を実装した。ATにおけるPSDセンサの配置は図 のようである。

図3.5: PSDセンサの配置
3つのPSDセンサから成るPSDセンサ群をATの前後左右に1つずつ計4つ装備した。センサ群における3つのPSDセンサの配置は、 一直線上に並べるのではなく図 のように両端のセンサを45度ずつずらし角度をつけて並べた。壁を検出しやすいよう、すべての PSDセンサは床から約1mの高さに設置されている。また、PSDセンサは物体にレーザーのような光をあて、その反射光を受光し て物体までの距離を算出しているため、障害物を点でしか検出できない。そのため、図 では障害物検出範囲を線として表した。
12個のPSDセンサを図 のように配置した理由は、できるだけ広い範囲で障害物を検出しながら壁沿い走行を行うためである。 装備するセンサの数が多ければ多いほど障害物検出が可能な範囲は広くなるが、センサの数が増えると必要な電力が増大したり、 データが増えて処理が遅くなったりとそれだけコストがかかる。12個のセンサの配置方法はいろいろ考えられるが、図 の (A)のように配置すると最も広い範囲で障害物の検出が可能である。そのため、障害物回避に特化した配置方法と言える。しか しこの配置方法で、壁との距離を一定に保ちながら走行することは難しい。壁沿い走行に特化したPSDセンサの配置方法は図 の (B)のような配置である。この配置方法はPSDセンサが3つずつ同じ方向を向いているため壁を検出しやすいが、ATの4つ角に センサの死角が多いことが問題である。そこで、図 の(A)と(B)の特徴を併せ持つ図 のような配置方法にした。12個と いうPSDセンサの数は、全方位移動するATが壁沿い走行と障害物回避を行うために必要最小限の個数であると考えられる。
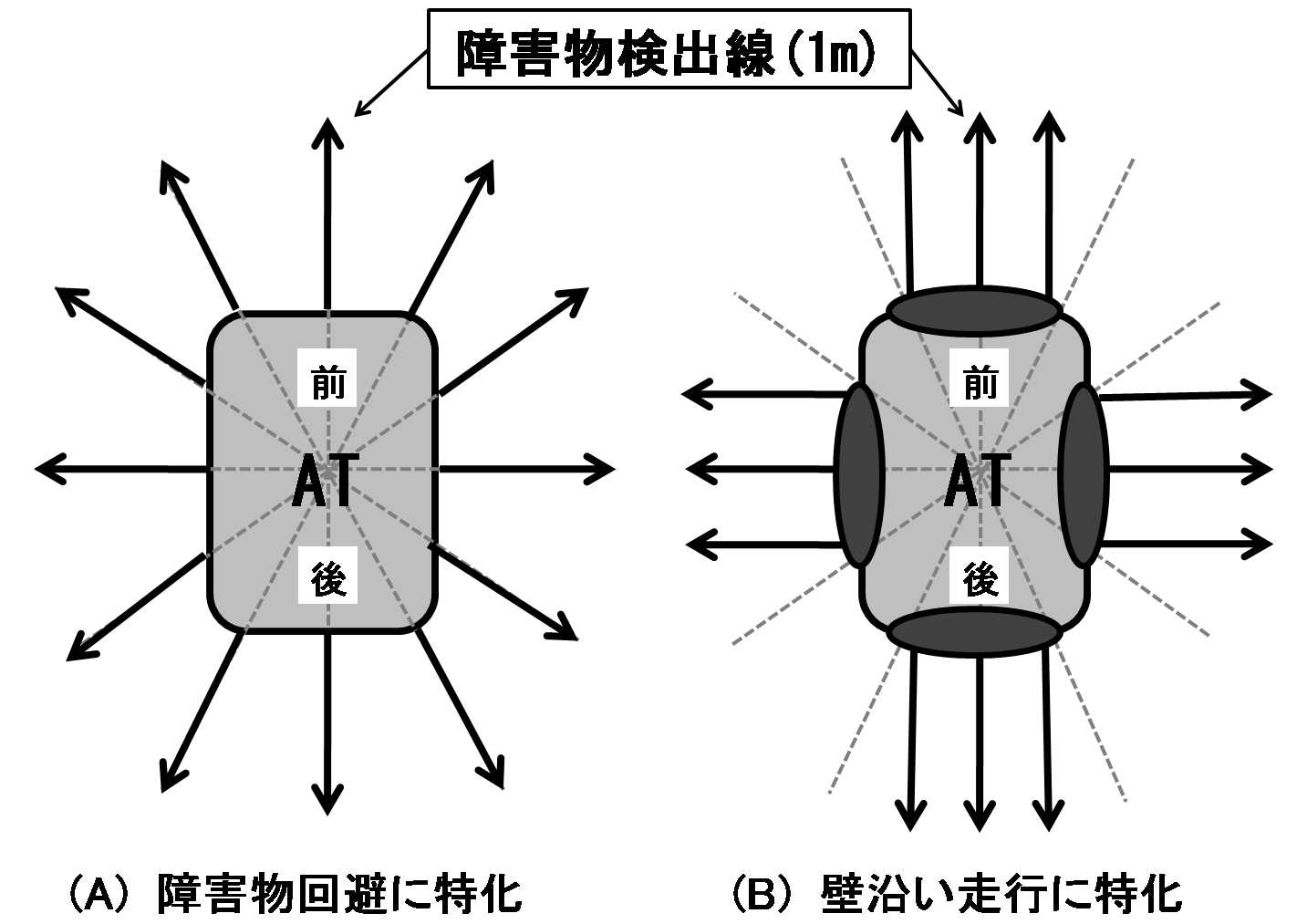
図3.6: 障害物回避用配置と壁沿い走行用配置
12個のPSDセンサは常に壁との距離を測定している。その測定距離によって、各センサと壁との位置関係を以下に示す「壁に近い」 「壁沿い」「壁から遠い」の3つの状態に分類した。「壁沿い」とは壁沿い走行中に保たれる壁との位置関係のことである。また、 分類の基準となる上限閾値と下限閾値はそれぞれ0.3mと1mに設定した。
さらに、各PSDセンサ値の分類結果を図 のPSDセンサ群ごとに3つずつまとめ、4方向のセンサ群の示す値として最終的に判定し た。その判定方法は次のようである。まず各PSDセンサ群を構成する3つのPSDセンサのうち「壁に近い」と示すセンサが1つでも ある場合、そのセンサ群は「壁に近い」と判定する。それ以外の場合で「壁沿い」と示すセンサが1つでもある場合、そのセンサ 群は「壁沿い」と判定する。そして残りの場合すなわち全てのセンサが「壁から遠い」と示す場合にのみ、そのセンサ群は「壁か ら遠い」と判定する。このように12個のPSDセンサの値を処理して、ATは自身の前後左右4方向にある壁とAT自身との位置関係 を把握している。
ATは、壁側のPSDセンサ群が示す値によって進行方向を変えることで壁沿い走行を実現している。ATから見て左側の壁に沿って通路 を自動走行する場合は図 のようである。
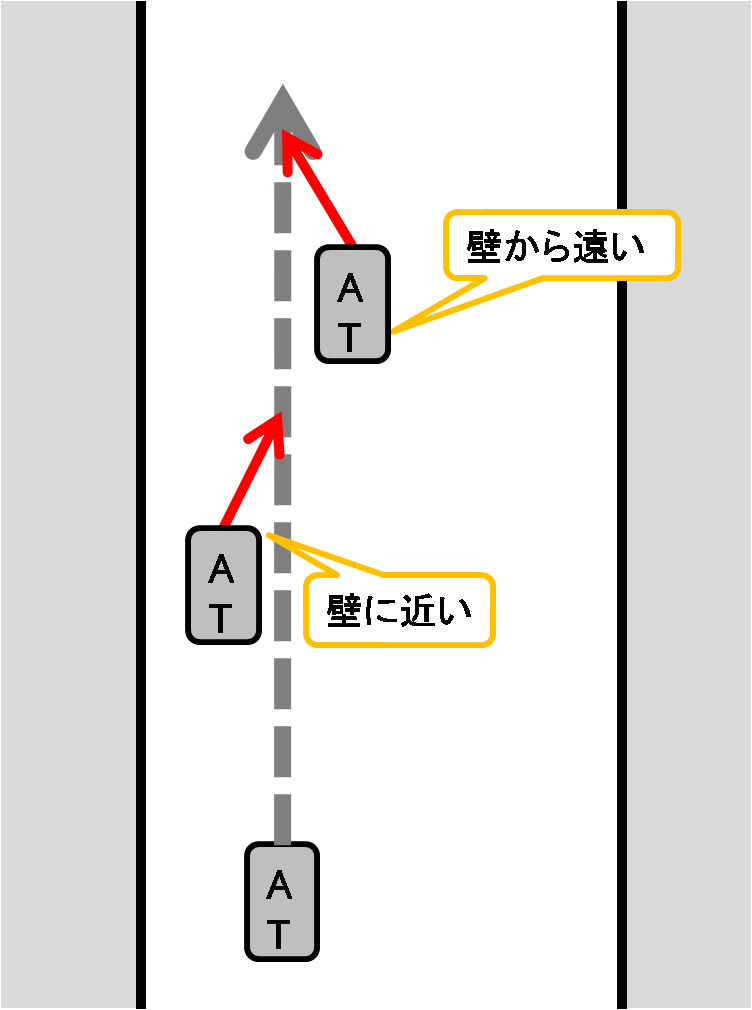
図3.7: 壁沿い走行
ATの左側のPSDセンサ群が「壁沿い」であることを示す場合、ATは前進走行を続ける。 しかし、路面状態などの影響により前進走行中のATはだんだん壁に近づいたり、壁から離れたりする。ATが壁に接近しすぎて、 左側のPSDセンサ群が「壁に近い」を示した場合、ATは進行方向を右斜め前に変えて走行する。そして、センサ群の示す状態が再 び「壁沿い」に切り替わったら進行方向を前方に戻す。逆に、ATが壁から離れてPSDセンサ群が「壁から遠い」を示した場合、ATの 進行方向は左斜め前に変わる。このように壁との距離を一定に保って走行することで、図 のようなまっすぐな通路はもちろん、 緩やかな曲線をえがいたような通路でも安定した自動走行が可能となる。
壁沿い走行にはATの左側の壁沿い、右側の壁沿い、前方の壁沿いの3つのモードがあり、それぞれのモードで2方向の移動をする。 すなわち表 に示す6種類のモードがある。これらのモードは、RFIDタグリーダがATの左側、右側、 前方の3か所に装備されていることに基づいている。 前方の壁に沿った走行モードを用意した理由は、左折や右折の際に壁の方向を向いて走行する場合があるからである。 また、表 の6種類の走行モードを切り替え、組み合わせることで屋内自動走行を実現している。
3.4.4 突き当たりでの右折・左折アルゴリズム
壁に沿って走行していると、図 (B)のような突き当たりに遭遇する場合がある。その場合は、走行可能な方向を判断してその向き に進行方向を変えなければならない。ATは走行中このような突き当たりに遭遇した時、走行モードを切り替えることで進行方向と ATから見た走行の手がかりとする壁の方向を変えることが可能である。
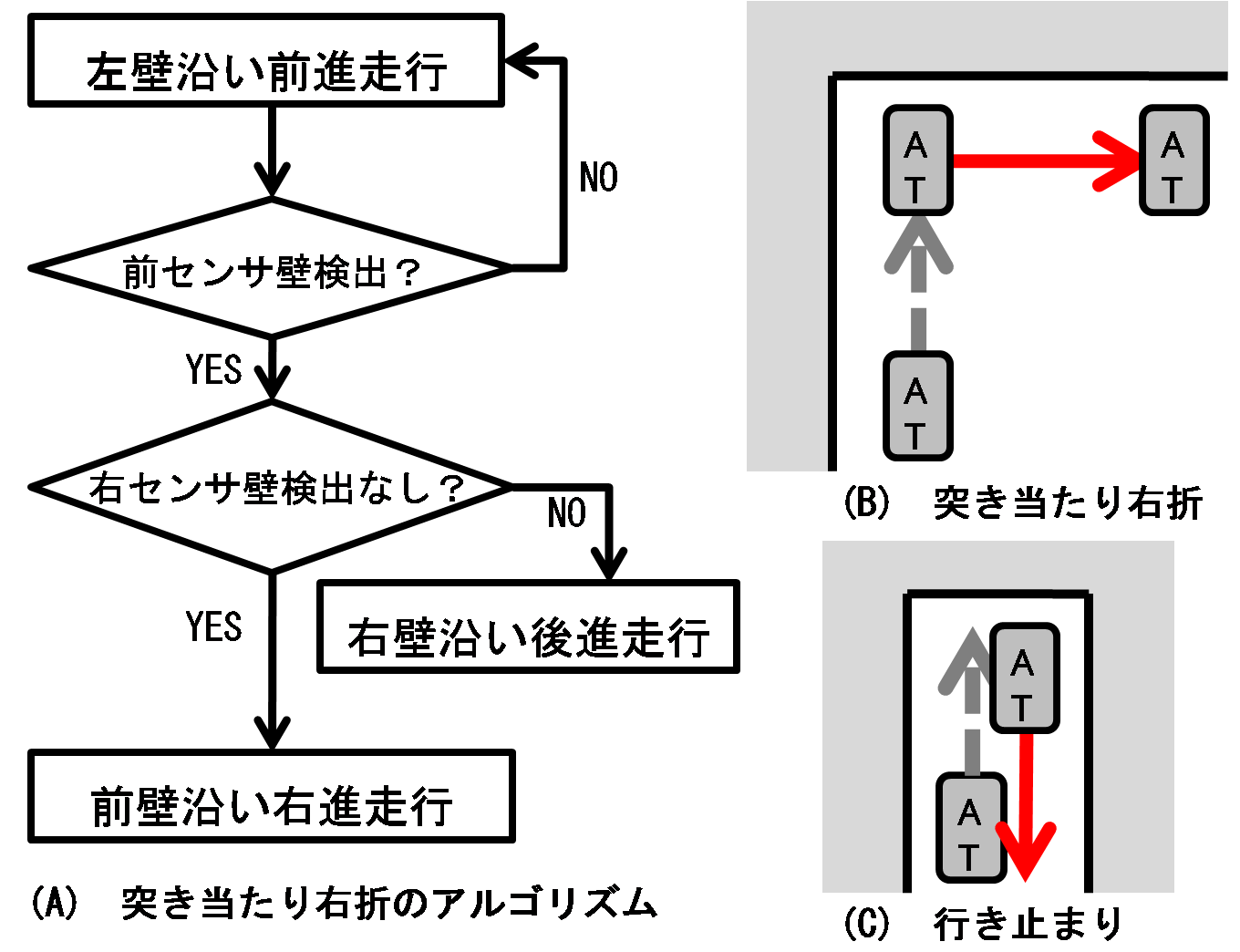
図3.8: 突き当たり右折・左折アルゴリズム
その一例として、左側の壁に沿って前向きに走行している途中、前方の壁に沿った右向きの走行に切り替えて突き当たりを左折す る図 (B)のような場合を考える。その場合の走行モード切替のアルゴリズムを 示したものが図 (A)である。 左壁沿い走行モードで走行中にATの前側のセンサ群が壁を検出して「壁に近い」あるいは「壁沿い」を示したとき、ATは右側に装 備されたセンサ群が示す状態を確認する。右側のセンサ群が「壁から遠い」状態を示している場合は右方向へ走行可能であると判 断し、前壁沿い右進走行モードに走行モードを切り替える。ここで右側のセンサ群が壁を検出している場合は、図 (C)のような 行き止まりであると判断し、走行モードを右壁沿い後進走行モードに切り替え引き返す動作を行う。このアルゴリズムは値を確認 するセンサ群を変えると、他の走行モードにも適応する。右壁沿い走行の場合は、左側のセンサ群が壁を検出していないことを確 認し、左進走行モードへ切り替えることで突き当たりを右折する。前壁沿い走行の場合は、後方のセンサ群が壁を検出していない ことを確認し後進走行モードへ切り替える。このようにしてATは突き当たりを右折したり左折したりする。
3.4.5 屋内交差点での右折・左折・直進アルゴリズム
突き当たりの他にもう一つATが右左折を行わなければならない場合がある。それが図 (B)のような交差点に遭遇したときである。 この場合も3.4.4で述べた突き当たりでの右左折と同様に、走行モードを切り替えることで右折・左折を実現した。また交差点にお いては右左折だけでなく直進する場合も考えられる。交差点を直進することは壁の無い場所を走行することと等しく、壁沿い走行 を行うATには危険である。しかし、AT自身が計測する走行距離とセンサを利用することで交差点を直進することも可能である。
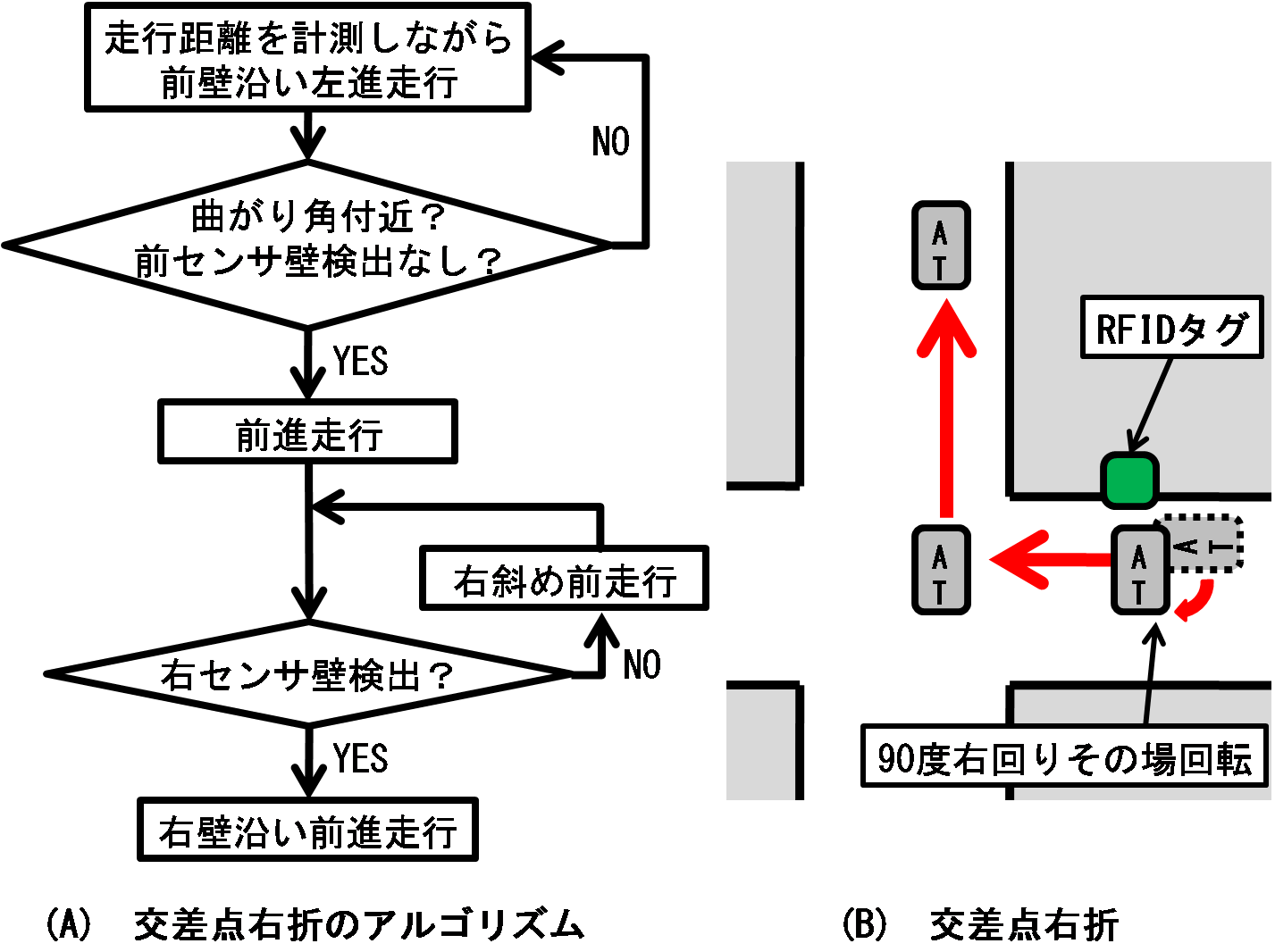
図3.9: 屋内交差点での右折・左折アルゴリズム
まず交差点での右左折の一例として、図 (B)のように交差点を右折する場合を考える。交差点で右左折を行う際、ATは必ず右 左折後の進行方向を向いて前壁沿い走行をしていなければならない。これは6種類の走行モードの中に「後ろ壁沿い」の走行モード が含まれていないことに基因する。図 (B)のように右折場所の直前に設置されたRFIDタグを読み取った時に前壁沿い走行してい ない場合は、タグを読み取った直後に90度その場回転をして前壁沿い左進走行モードに切り替える。さらにそのタグを読み取っ た時から、走行距離の計測を開始する。その後は図 (A)のアルゴリズムに従って交差点を右折を行う。計測した走行距離から曲 がり角付近であると認識し、これまで壁を検出していた前側のセンサ群が壁を検出しなくなった時、ATは左進走行を止めて前進走 行を行う。その前進走行中にATの右側のセンサ群が壁を検出した場合、交差点の右折が完了したと判断して走行モードを右壁沿い 前進走行モードに切り替える。右側のセンサ群が壁を検出しない場合は、右側にあるはずの壁に近づくため右斜め前走行を行う。 また交差点での左折は、前壁沿い右進走行モードから同様のアルゴリズムで左壁沿い前進走行モードに切り替えることで実現可能 である。
次に、図 (B)のように交差点を直進する場合について考える。
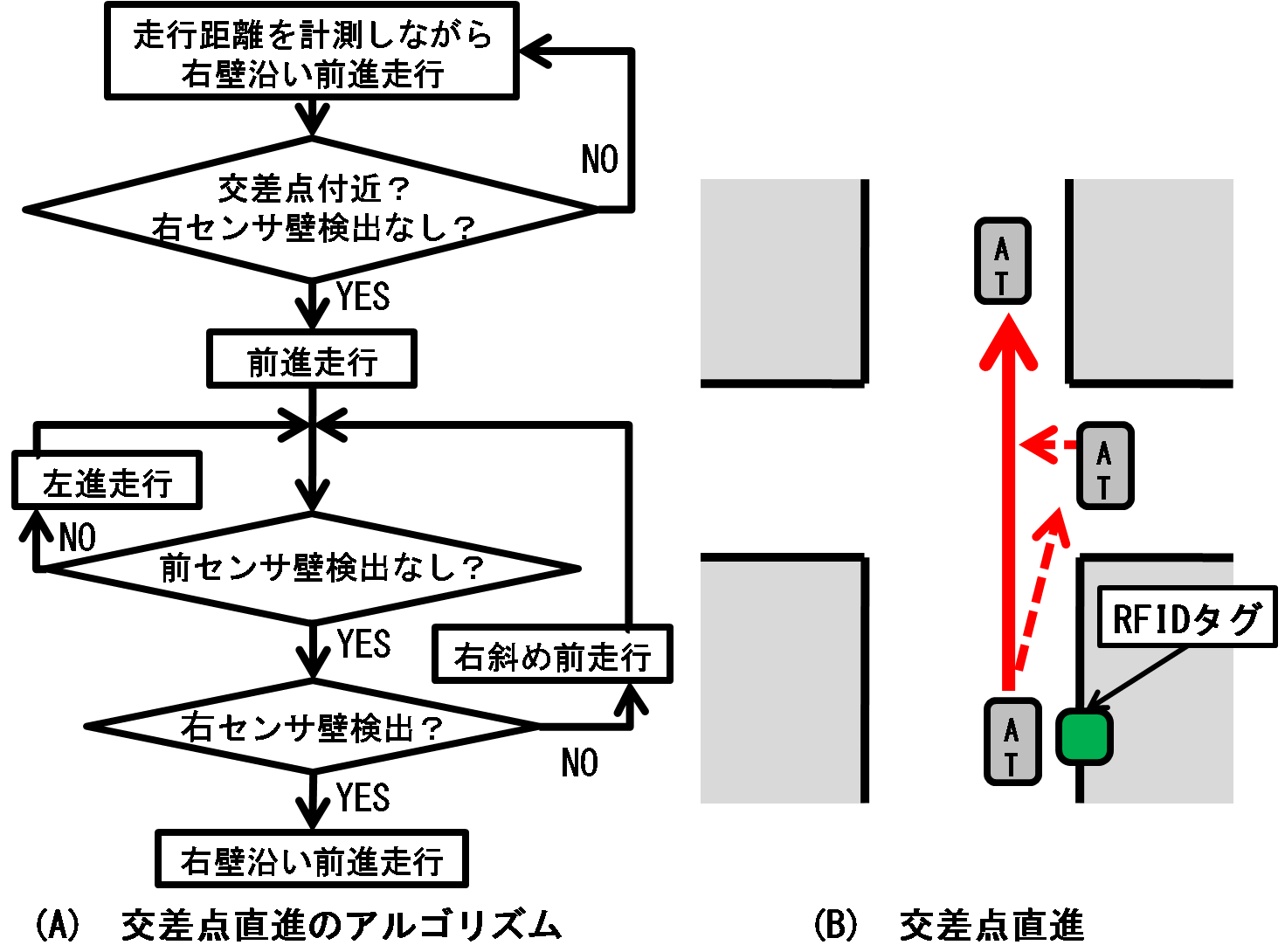
図3.10: 屋内交差点での直進アルゴリズム
交差点を右左折するときとは逆に、直進する際は必ず右壁沿いか左壁沿いの前進走行をしていなければならない。それゆえ、交差 点の直前にあるタグを読み取ったときに前壁沿い走行をしていた場合は、90度その場回転をして前進走行モードに切り替える。 そして図 (A)のアルゴリズムに従って走行する。交差点直前のタグを読み取った直後から計測し始めた走行距離により交差点 に侵入したと判断したら、右側のセンサ群が壁を検出しなくなっても前進走行をし続ける。前進走行中に前方のセンサ群が壁を 検出した場合は、路面状態などで真っすぐ前に進まず右に逸れたと考えられるため、前側センサ群が壁を検出しなくなるまで前進 走行を止めて左進走行をし、軌道修正を行う。そして再び右側のセンサ群が壁を検出したら、ATは交差点通過が完了したと判断し 再度右壁沿いの前進走行を開始する。このとき右側のセンサ群が壁を検出しない場合、右側にあるはずの壁に近づくために右斜め 前走行する。左壁沿いの前進走行で交差点を直進する場合も同様である。
以上のように表 の6種類の走行モードを「壁に突き当たったとき」「屋内交差点での右折・左折が 完了したとき」「RFIDタグを読み取ったとき」に切り替え、つなぎ合わせることで目的地までの屋内自動走行が可能である。ただ し、左壁沿い走行モードから右壁沿い走行モードに切り替わる場合(及びその逆)は左右への横走行あるいは斜め走行を行い、左 右の壁沿い走行モードから前方の壁沿い走行モードに切り替わる場合(及びその逆)は90度その場回転を行う。
4 実験と考察
前章で、ATの測位方法や目的地までの屋内自動走行アルゴリズムについて述べた。 本章では、まずATを用いて行った、屋内での自動走行実験について述べ、次に今回実現したIATシステムの課題や問題点についての考察を述べる。 さらに、この実験のために試作した、目的地到着時に搭乗者に対して目的地の情報を提示する機能についても説明する。
4.1 屋内走行実験
正確な測位が困難な屋内で、移動体が自律的な走行を行うことは難しい。 しかし、本研究では移動体が屋内の壁沿いを走行することで、この問題を解決することが可能であると考えた。 そこで、PSDセンサとRFIDタグリーダを搭載した全方位移動・その場回転が可能なAT上に、前章で説明した 壁沿いの自動走行アルゴリズムを実装し、その動作を確認した。 本研究で考案したアルゴリズムは、様々な経路で適応可能な仕組みになっている。 このアルゴリズムで本当に屋内自動走行が可能かどうか、指定した目的地まで辿り着けるかどうかを確認するため、 いくつかの場面を設定して、走行実験を行った。 そのうちの1つを例に挙げて実験内容・実験結果を述べ、今回行った実験により明らかとなった課題・問題点について考察する。
4.1.1 実験環境
本実験は名古屋大学IB電子情報館南棟3階(東側)で行った。実験場所のフロアマップは図 のようになっている。この実験では、 開始位置をエレベータの中、目的地をサーバ室と設定した。その開始位置と目的地は図 のような位置関係にある。そのため壁沿いを考慮 した最適な走行経路は図 の矢印の通りで、エレベータから出てすぐに右折し、ATから見て左側の壁に沿って走行した後、左折・右折を行って 目的地到着という走行プランになる。全走行距離は30m程度で、走行経路の床はパネルタイプのカーペットであった。
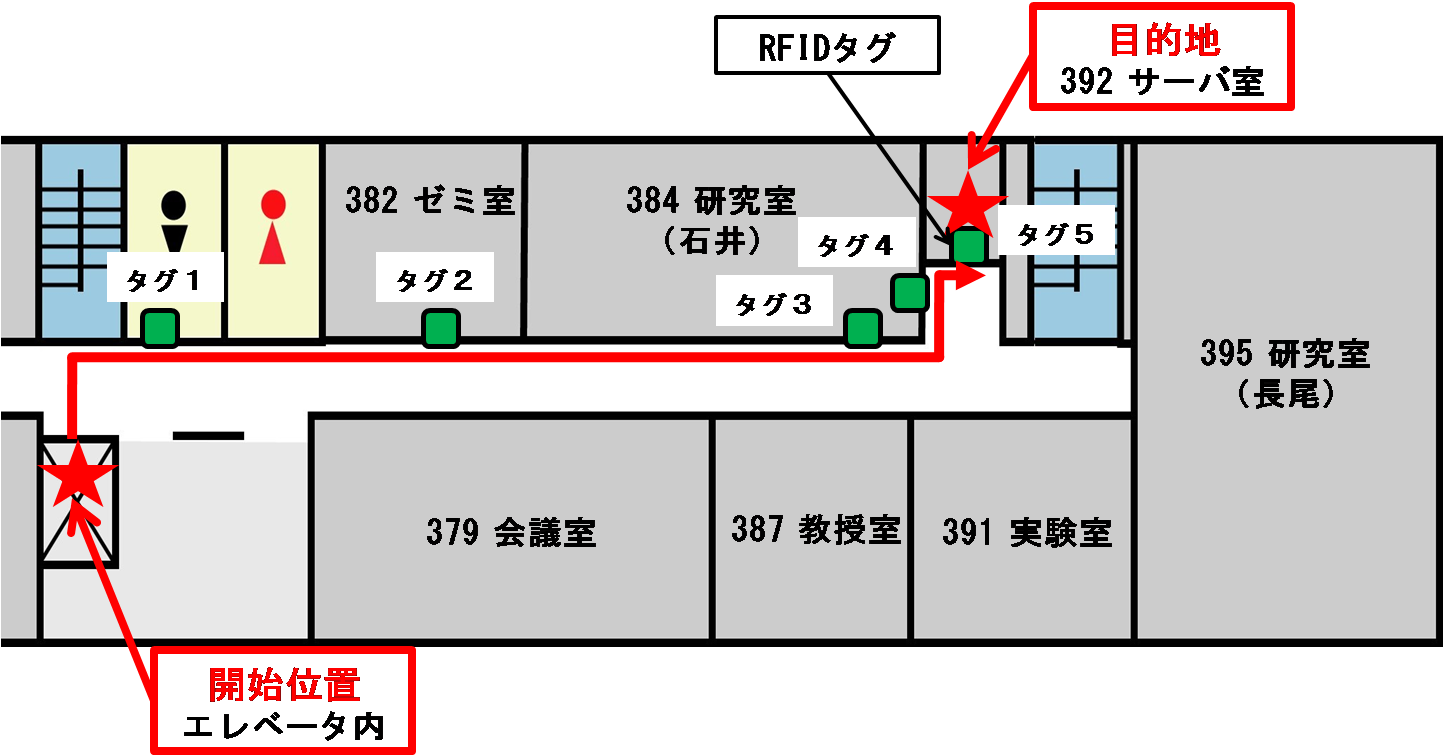
図4.1: 実験環境と走行経路
開始位置から目的地まで走行において、自動走行のためのランドマークとなるRFIDタグは図 に示した5つの場所に設置した。 図 の 5つのタグに付けられた番号は、それぞれのタグのIDである。またこれらのタグは全て、各部屋の郵便受けや貼り紙の裏などに 設置し、RFIDタグの存在が外部にはわからないようにした。
また今回の実験では、ATの進行方向と逆向きに、ATに向かって歩いて来る人間を避けてすれ違うということを試みた。図 の走行経路において長い直進走行(左壁沿い前進走行)を行う部分の途中で、 ATとすれ違うように人間に歩いてもらい、ATが人間と衝突しないよう真横へ移動するという回避動作を行うかどうかを確かめた。 ただし、人間はATの正面に向かって歩くようにし、ATが回避動作をする前に左右に避けたり後ろに動いたりしない。 さらにATが避けて前が開けたら、進行方向を変えずその場を通過する。
4.1.2 結果と課題・問題点
まず目的地をサーバ室と設定すると、ATは現在位置と目的地を結ぶ最適な経路を算出し、移動プラン及び経路上にある5つのタグの利用方法を決定した。 ATが算出した経路は図に矢印で示した経路の通りであり、経路上にある5つのタグは、今回の実験では以下のように利用された。
-
タグ1:ATの走行モードを左壁沿い前進走行モードに切り替える
-
タグ2:ATの現在位置を確認する
-
タグ3:ATの走行モードを前壁沿い右進走行モードに切り替える
-
タグ4:ATの現在位置を確認する
-
タグ5:目的地であることをATに知らせ、自動走行を停止させる
実際に実験を行った様子を図 と図 に示す。図 はIATの手順を表し、 図 は人を避ける手順を表している。 エレベータ内で目的地をサーバ室に設定し(図 左)、エレベータの扉が開いたらコンソール画面の自動走行開始ボタンを押して走行を開始した。 エレベータから出るときATは壁に沿わない前進走行をし、ATの前方の壁に突き当たると、突き当たり右折のアルゴリズムに従って、 車体の向きを変えずに前の壁に沿って右方向へ横移動した。AT前方のタグリーダでタグ1を読み取ると、 90度時計回りのその場回転をして車体の向きを変え、左側の壁に沿った前進走行に切り替わった(図 中央)。左側の壁に沿って走行中、進行方向から向かってくる人と約50cmの距離まで近づく(図 左)と、突き当たり右折のアルゴリズムに従って右方向への横移動をし(図 中央)、人間との衝突を避けた。その後すぐATの前側のセンサが障害物を検出しなくなると、再び左側の壁に沿って 前進走行を続けた(図 右)。そして、タグ3をAT左側のタグリーダが読み取ると、90度反時計回りの その場回転をし前壁沿い走行に切り替わり、交差点左折の要領で曲がり角を左折した。タグ4を読み取った後、 もう一度突き当たり右折をして目的地に到着、そして停止した(図 右)。

図4.2: IATの様子
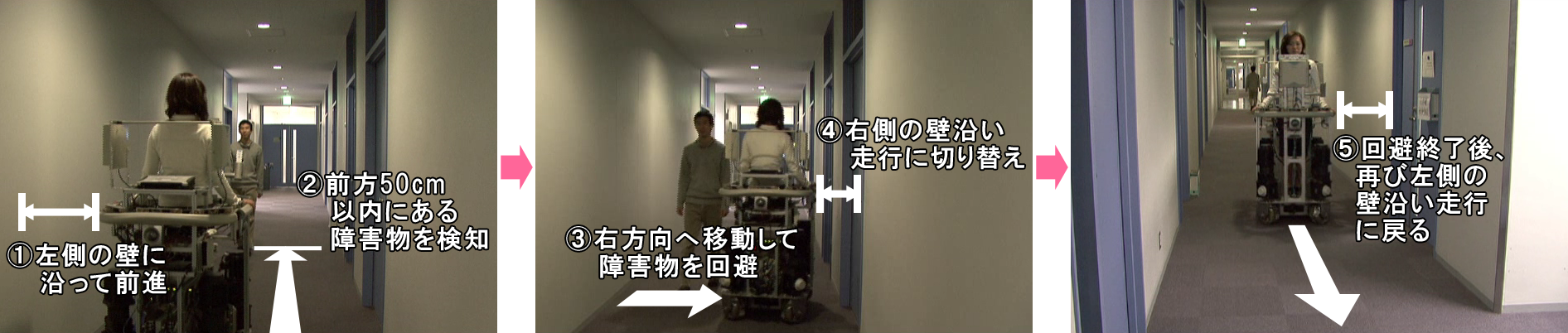
図4.3: 人を回避する様子
今回の実験で、状況設定にいくつかの条件を設けることによって、提案手法による目的地までの屋内自動走行が可能であることがわかった。 しかし、現状では本研究の提案するIATシステムには様々な問題が残されている。 以下では、現状での問題点及びシステムを改善するための主要な課題について述べる。
4.1.2.1 PSDセンサに関する問題
今回ATに装備したPSD測距センサには2つの大きな問題点がある。1つは、センサから1m以内という近距離の障害物しか検出でき ないことである。ATは通常の移動体と同様、走行状態にあるとき急に停止したり、急に進行方向を変えたりできないため、必ず制 動距離を考慮しなければならない。このことを考えると障害物検出距離1mは非常に短く、危険であると考えられる。ATの速度を 人間の歩く速度より遅く設定して行った本実験でも、ATの制動距離や処理遅延によって壁までの距離10cm程度のところまでATが 接近してしまうことがあった。
もう1つの問題点は、障害物を点でしか検出できないことである。配置方法によってできる限り広範囲の障害物を検出するように したが、現状ではまだセンサに死角があるため人間や柱といった比較的小さな障害物を検出できない。そのため、センサが検出可 能な位置にいる人間しかATは回避できないのである。
今後、ATの速度を上げても壁や人間に衝突しないで自動走行することを可能にするためにも、より広範囲で障害物検出が可能なセ ンサを用いるべきであると考えられる。
4.1.2.2 人間との衝突回避における問題
今回の実験では人を避けることを行ったが、避けられる人が進行方向を変えて動かないことと、その人以外にATの周囲に人が いないことを前提としたものであった。しかし、人間の動きは予測が困難であり、ATの周囲に複数人存在することが考えられる。そのため、ATと 衝突しそうになった人がATと同時に同じ方向に移動したり、ATが人を検知して避けようとしたらその方向に他の人がいたりする場 合にも対応可能な人間との衝突防止方法を考えなければならない。
4.1.2.3 RFIDタグの配置に関する問題
今回の実験で設定した開始位置から目的地までの自動走行で必要としたRFIDタグは5つであったが、IATシステムは建物内の様々 な経路を自動走行するため、壁に設置すべきタグの数はさらに多い。 このとき、ATは、実際の位置から最短距離に位置するタグとは異なるタグを読み取ったり、タグリーダが3つ装備されているために 複数のタグを一度に読み取ったりしてしまう状況が生じる。その結果、ATは自身の「現在位置」を誤って認識してしまう。 ATは読み取ったタグと地図情報から現在位置を認識し、認識した現在位置から目的地までの経路と、どの壁に沿ってどこで右左折を行うのかという移動プランを決定する。 そのため、現在位置を誤って認識すると経路・移動プラン決定も誤ってしまい、結果として誤動作につながる。 これを防止するためには、現在位置の認識精度が上がるようにタグの設置場所を工夫しなければならない。
4.1.2.4 エレベータなどの屋内設備との連携に関する問題
今回の実験では目的地設定をエレベータの中で行った。なぜなら、現在のところエレベータに通信機能がないため、ATと通信して エレベータを呼んだり、目的階を設定したりすることができないからである。本来、IATシステムの目的地設定は建物の入口付近で行うべきであり、将来的にはATとエレベータなどの屋内設備が連動することで、フロア間の移動も自動で行うことが可能であると考えられる。
4.2 目的地情報の提示
本研究で実装したIATシステムには、設定した目的地まで移動体が自動走行して搭乗者を移動させるという機能の他に、 目的地に到着した時にその目的地の情報を提示する機能が備わっている。この機能によって、搭乗者である人間は目的の部屋の扉を 開ける前にその部屋がどんな部屋なのか、あるいは本当に自分が来たかった場所なのかということを知ることができる。
まず、目的地に到着して自動走行が停止すると同時に、ATのコンソール画面に「目的地に到着しました。目的地の情報を表示しま すか?」というダイアログが表示される。そこで「はい」を選択すると第2章で説明したコンソール画面の情報提示フレームに 目的地の情報が表示される。その画面を図 に示す。情報提示フレームの上段で画像を表示し、下段で動画を表示するようになっ ている。本実験ではサーバ室を長尾研究室に見立てて目的地情報を提示したため、動画表示部分には研究内容の紹介ビデオを 映した。また、情報提示フレームを用いる以外に目的地に関連するインターネット上のホームページを表示することも可能である。 目的地の情報としてどんな情報が有効なのかは、その部屋の属性やユーザの目的に依存すると考えられる。
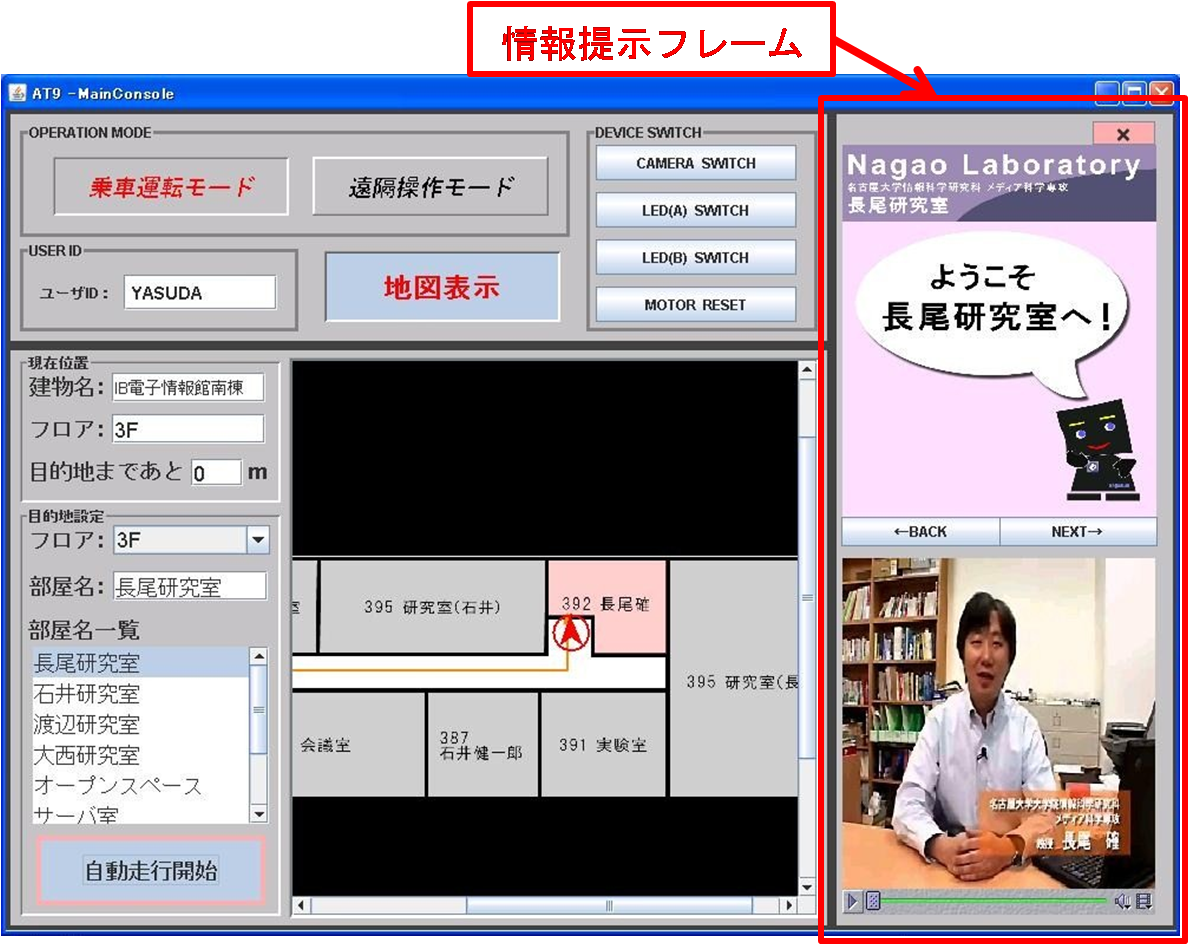
図4.4: 目的地情報の表示画面
4.3 目的地情報の取得
ここでは、前節で述べた目的地情報をどのように取得するのかについて述べる。これまで述べてきたように、本システムでは 屋内自動走行中の位置を知るためのランドマークとしてRFIDタグを建物内の壁にいくつか設置した。また目的地をATが把握するために、 建物内の各部屋の入口付近には必ずRFIDタグを設置するようにした。さらに、ATは施設サーバと常に通信しており、施設サーバは 各ATがタグを読み取った時に送信する現在位置情報によりすべてのATの位置を把握している。施設サーバは、建物内に設置された 各タグに対応づけられた全情報を保持している。 目的地に設置されたタグをATが読み取ったときに得られるIDをキーとして、ATが施設サーバに問い合わせることで、目的地に対応した 情報を施設サーバから取得することができる。
5 関連研究
本研究では、個人用知的移動体ATを用いて人間を目的地まで自動で移動させることを行った。本研究以外にも、人間の移動を移動 体が支援する研究はいくつかある。ここでは、それらの研究について紹介し、本研究との違いについて述べる。
5.1 知的車椅子
移動能力に障害を持つ人間にとって移動体は、その能力を補うことができる手段であり、電動車椅子はその代表的なものの1つで ある。しかし、従来の電動車椅子の操作性は必ずしも直観的でなく、利用者が自分の意図どおりの操作ができるようになるまでに は多くの時間を要する。例えば、ジョイスティックを用いたインタフェースでは、搭乗者の姿勢や車椅子自体の特性などの要因か ら搭乗者の意図と実際の動きにずれが生じて危険を伴う可能性がある。高齢化社会の到来による身体の移動機能が低下した高齢者 の増加に伴い、より安全で機能性の高い電動車椅子の開発が望まれている。このような背景のもと、これまでより搭乗者の意思や 周囲の環境に適応した動作が可能な知的車椅子の研究が行われている 。
濱上らの知的車椅子では、事前に学習した障害物回避や壁沿い行動による移動時の搭乗者の操作負担の軽減や、他の知的車椅子と 協調することによる道路の譲り合いや隊列成型といった協調行動の実現などを目指している。
濱上らの研究プロジェクトでは、車椅子を日常的に必要としている人を対象とし、動作を支援するものである。しかしATでは対象 とするユーザを限定するのではなく、健常者や障害者という枠を超えて人間の移動及び情報取得能力を拡張することを目指してい る。またこの研究は、利用者の目的地までの安全な移動を支援するものであるため、利用者が目的地の場所や目的地までの経路を 把握し、それに応じて車椅子の進行方向や動きを操作しなければならない。それに対して、本研究で提案するIATシステムは、目 的地の場所や目的地までの経路がわからなくても行きたいところへ安全に移動できる、ナビゲーションとしての機能も兼ね備えた 仕組みなっている。
5.2 RCT~(Robotic Communication Terminals)
「移動すること」を人間にとって最も基本的で意味のある要素の一つとして捉え、移動に必要な状況把握や情報アクセスを快適に することを目指し、「人にやさしい情報通信移動システム」をテーマに立ち上げられた研究プロジェクトがRCTである 。 RCTは、障害者や高齢者のための移動支援システムとして、以下に示す3つの根幹となる端末で構成されている。
-
環境設置端末
複数個所に固定して設置される情報処理端末である。周囲の環境を監視し人間や車の有無などを判断する。 さらにインターネットを用いた通信機能を備えているため、周囲の情報端末と通信を行い情報入手の補助をする。
-
ユーザ携帯型移動端末
人間が持ち歩く携帯型の情報端末で、通信により取得した周囲の情報をユーザの状態に合わせて提示する。 提示には人間の視聴覚、さらには触覚を利用したインタフェースを取り入れている。
-
人間が搭乗して操縦することができる情報端末で、操縦系には利用者の障害に合わせて設計された ハンドル又はジョイスティックが装備されている。センサからの情報を処理した自動運転支援機能も装備されている。
ユーザ搭乗型移動端末
RCTプロジェクトは、人間の行動を構成する要素の中で「移動」注目し、情報通信技術を利用して人間の活動を効果的なものにする という点で、我々のスタンスと類似している。特にユーザ搭乗型端末による、移動と実世界・情報世界からの情報取得、ユーザに 合わせた情報の提示はATのコンセプトと似ている。この研究のユーザ搭乗型端末には、移動中の人間の不注意や操縦ミスによる事故 を防止する機能はあるが、本研究のIATシステムのように、目的地を設定すれば自動でその目的地まで人間を移動させる機能は装備 されていない。そのため、目的地へ行くためには人間が操縦して進むべき道や進行方向を決定しなければならない。しかしながら、 このRCTプロジェクトには「人間」「移動体」「環境」が通信し合うことで、互いに衝突することを防止するという考え方において 参考にすべき点が多い。
5.3 インテリジェント車いすロボットTAO~Aicle
高齢化社会が進展すると、移動手段として車椅子を必要とする人の数が増えると予想される。車椅子には手動式・電動式など様々 なタイプのものがあるが、利用者の利便性や安全性を向上し、介助者の負担を軽減するためには簡単な操作で自律的に移動可能な 車椅子が必要である。そこで、畑瀬らの研究プロジェクトでは自律移動が可能なインテリジェント車いすロボット“TAO~Aicle”を 開発している 。また畑瀬らは、愛・地球博のロボットステーション内の屋外デモコースにて実証実験運用を行った。
TAO~Aicleの外観は通常の電動車椅子と同じであるが、それには位置認識のためのGPSアンテナや障害物回避のためのレーザレンジ センサが搭載されている。目的地設定は肘掛け部に搭載されたPDAの画面を操作して行い、走行中は車椅子の状態を搭乗者に画像と 音声で伝える。 TAO~Aicleを自律移動させるためには車椅子の自己位置認識精度を上げなければならない。畑瀬らは、走行エリアの近くにGPS基準局 を設置して相対測位を行い、さらに地面にRFIDタグを設置して絶対位置を取得するという方法でこの問題を解決している。RFIDタグ を読み取るためのRFIDリーダは車椅子座面下に設置されている。 また、TAO~Aicleの自律移動は無線LANを通じて接続されているサーバにより実現されている。TAO~Aicleは信号機のステータスをサ ーバから受信することで、信号機と連動した動作が可能である。
このTAO~Aicleの自律移動の研究と本研究とは、設定した目的地まで自動で安全に人間を移動させるという点で同じである。また RFIDタグを測位のランドマークとし、センサを用いて障害物回避を行うという自律移動実現のためのアプローチも類似している。 しかし、大きく異なるのは我々が開発したATは全方位に移動できるということである。TAO~AicleはATのように横へスライドするこ とができないため、人や物などの障害物が急に近くに現れると回避しきれずに停止してしまうが、ATはそのような障害物も回避で きる。さらに、TAO~Aicleは測位にGPSを用いているため屋内での自律移動は難しいと考えられる。屋内での位置認識のためには 壁沿い走行が有効で、そのためには全方位移動が最適である。その点を考慮すると、屋内での自律移動にはATによるIATシステム のほうが適していると考えられる。
5.4 車椅子型自律移動ロボットDREAM-3
近い将来訪れる高齢化社会においては介護者の不足が考えられるため、高齢者や身体障害者が不自由なく生活するための新しい 福祉技術の開発が望まれる。そのような背景で、大北らは車椅子型の自律移動ロボットDREAM号を開発している 。 DREAM号開発の歴史は15年以上で現在は4世代目のDREAM-4までつくられている。その中でDREAM-3が全自動自律移動の機能を 備えており、本研究のATによるIATシステムに似ている。
DREAM-3は全自動走行方式で、タッチパネル等で目的地を指示すれば、ロボットが環境を認識して目的地まで走行するものである。 周囲の環境認識のための超音波センサ6個と、走行経路上に設置されている金属性のランドマークを読み取るための磁気センサ、 他にジャイロセンサなどがDREAM-3に搭載されている。自動走行の際の位置認識には「環境マップ」と呼ばれる、PC上で1ドット が実世界の1cmと対応するように建物内の壁・柱・固定障害物の存在情報をあらかじめ書き込んだ地図情報を用いている。これは、 電動車椅子が走行する場合に、エンコーダとジャイロセンサから取得した走行履歴によりPC上の車椅子モデルが環境マップ上で 走行し、環境マップ上を走行する車椅子モデルが、走行経路を探索・決定するという仕組みになっている。途中で地図上には無い 障害物をセンサで検知すると、それを地図上に書き込みを行う。
本研究とDREAM-3との類似点は、建物内において設定した目的地まで自動走行することである。しかし、その実現手法が異なる。 1ドットを1cmに対応させる環境マップは将来広い建物での走行を考慮すると、作成に要するコストが大きい。またエンコーダ から取得する値を積分して得られる走行履歴は、誤差が時間とともに増大してしまう可能性がある。ATは全方位移動が可能なため、 屋内の比較的狭い経路での右折・左折をDREAM-3よりスムーズに行うことができる。
6 まとめと今後の課題
6.1 まとめ
筆者の所属する研究室では、移動体に情報処理と通信機能を持たせ、情報処理と人間の物理的な移動とを連動させる、搭乗型コンピューティングという発想のもと、個人用知的移動体ATを開発している。現在開発中のATは、駆動系にオムニホイールと呼ばれる複合車輪を用いて、全方位移動とその場回転が可能である。 本研究では、建物内において搭乗者である人間を目的の場所まで自動で移動させるという、屋内自動トランスポーテーション(IAT)の提案・実装を行った。
人間を目的地まで誘導する従来のナビゲーションシステムと異なり、IATは人間を目的地まで物理的に移動させることが可能である。 従来のナビゲーションシステムの1つに携帯情報端末を利用した屋内道案内があるが、機器ごとの複雑な操作を覚える必要がある、 地図と実世界を照合する空間把握能力が必要であるといった課題がある。また、携帯情報端末を操作して情報を取得しながら移動することは、 情報端末に気を取られて身近に迫る危険や情報を見落とす危険性もある。本システムはこのような課題を解決する。さらに、本システムが有効に機能する 場所の一つの例として、建物内の構造が複雑で迷いやすく、自力での歩行が困難なために移動体の利用を必要とする人が多い、総合病院を想定している。
屋内での自動走行を実現するため、1mの範囲で障害物までの距離を検出可能なPSDセンサを用いて、常に壁との距離を一定に維持して走行する壁沿い自動走行を行うように した。正確な測位ができない屋内でも、壁に沿って走行することで地図との対応を取れるようにするためである。壁沿い走行するだけでは目的地に到達できないため、 ATに位置を認識させるためのランドマークが必要である。そのランドマークとしてRFIDタグを壁のいくつかの場所に設置した。ATは屋内の壁の情報と壁に設置してあるタグの情報により、 現在地と目的地を結ぶ経路を自ら計算し、どのように壁に沿って走行するべきかを判断する。ATは、自身のおおよその現在地をタグと走行履歴により常に把握可能であるため、 目的地を設定するだけで屋内のどこからでも開始することができ、搭乗者の意志によりいつでも終了させることができる。
6.2 今後の課題
6.2.1 障害物検知センサの改善
本実験で用いたPSDセンサは、センサから1m以内の近距離の障害物しか検出できない上に死角が多い。壁の途中にある柱などの凹凸を上手く回避できない。 人間を回避する際も、センサが検出可能位置にいる人しか回避することができない。また検出距離が短いため、ATの制動距離を考えるとを走行する時の速度が 限定される。
これらの問題を解決するため、今後はレーザレンジセンサのような広範囲を検出可能なセンサを用いて障害物回避の精度を高める予定である。 レーザレンジセンサを用いれば、10m程度の遠距離の障害物を検出することができるため、自動走行の際のATの速度を上げることが可能になる。 ゆえに、より安全で快適な自動走行ができるようになると考えられる。
6.2.2 RFIDタグの最適配置
屋内を走行中、ATは壁に設置されたRFIDタグを読み取ることで常に現在位置を認識する。また、ATは認識した現在位置を地図情報と照合することにより 自動走行する際の目的地までの経路と移動プランを決定する。そのため、現在位置の認識を誤ると目的地までの経路及び移動プランの決定も誤り、その結果が 誤動作として現われてしまう。さらに、 RFIDタグの配置状況によっては、実際のATの位置から最短距離にないタグを読み取ったり、タグリーダが複数搭載されているために、いくつかのタグを同時に読み取ってしまい、現在位置を正しく認識できない場合がある。 壁に設置するタグの数は、多すぎると誤動作の原因となり、少なすぎると正確な位置認識が行えず、自動走行の精度が下がるため、最適なタグの配置方法について考えなければならない。
6.2.3 IATの多層フロアでの実現
本研究で実装したIATシステムは、フロア間を自動で移動することができない。それは、エレベータを呼んだり、目的階を設定したりすることをATが自動で行うことが できないからである。今後は、エレベータと連携することでエレベータの乗降を可能にし、さらに多層の地図情報を施設サーバに用意することで施設内の活動範囲を広げる ことを目標とする。フロア間を自動で移動することができれば、IATは建物内のどこの場所にでも目的地を設定することができる。
6.2.4 人間との衝突回避
本実験では、限定した条件における、人間との衝突回避行動を実現した。ATは全方位に移動できるため、近距離に急に接近した人間を避けるよう動作することが可能である。 しかし、衝突が事前に予測できる人間に対しては、直前になってから衝突回避動作を行うのではなく、それ以前に円滑な衝突回避行動を行うことが望まれる。
また今後は、人間の移動が予測できない場合、ATの周囲に複数人存在する場合などを想定した、衝突回避の 手法も検討しなければならない。そこで問題となるのが、例えば、ATが衝突を察知して避けようとした方向に人間も同時に移動してしまう場合や、避けようとした場所に 別の人間が存在する場合である。移動体に乗らず自力で歩行する人間を強制的に移動させることは不可能であるため、人間に小型の通信機器やタグを装着させることで 事前にATと通信し、ATの接近を人間に知らせたり、衝突回避行動の結果として移動する経路を伝達する方法などが考えられる。
屋内では歩行者が多いことを考えると、自動トランスポーテーションを行う移動体と歩行者との共存のために、人間との柔軟な衝突回避は重要な課題である。
謝辞
本研究を進めるにあたり、指導教員である長尾確教授には、研究に対する姿勢や心構えといった 基礎的な考え方から、 研究に関する貴重な御意見、論文執筆に関する御指導など、大変お世話になりました。 心より御礼申し上げます。
大平茂輝助教には、研究に関することから技術的なことまで幅広く御指導、御意見を頂き、大変お世話になりました。 心より御礼申し上げます。
山本大介さんには、ゼミ等で貴重な御意見を頂き、また、研究室の楽しい雰囲気づくりをしていただきました。 土田貴裕さんには、研究に対する取り組み方や、基礎的な知識を身に付けるにあたり数々のご指導を頂きました。ここに御礼申し上げます。
成田一生さんには、本研究を進めるにあたり絶対不可欠であるATに関することや、研究に対する基礎的な進め方やアドバイス、技術的な御指導など様々な面で大変お世話になりました。 林亮介さん、伊藤周さん、石戸谷顕太朗さん、増田智樹さん、尾崎宏樹さんには、研究や実装に関することや、研究室生活における様々な面でお世話になりました。ありがとうございました。
長尾研究室秘書である鈴木美苗さんには、研究室生活や学生生活の様々な面でお世話になりました。 ありがとうございました。
また、石井健一郎教授、鳥海不二夫助教をはじめ、石井研究室メンバーのみなさまには、実験場所として研究室前の廊下の使用を許していただき、ありがとうございました。心より御礼申し上げます。
最後に、影ながら見守っていただき、生活を支えていただいた両親にも最大限の感謝の気持ちをここに表します。 ありがとうございました。